Robot communication control method, system and device based on federated reinforcement learning
A technology of reinforcement learning and robotics, applied in the direction of constraint-based CAD, based on specific mathematical models, computer-aided design, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
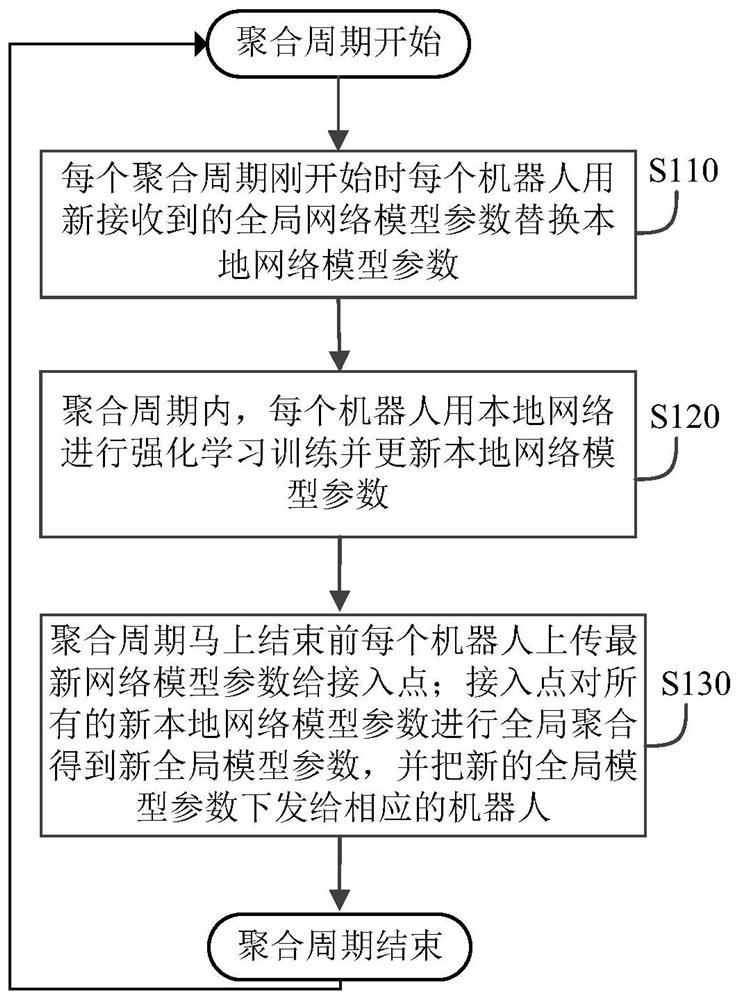
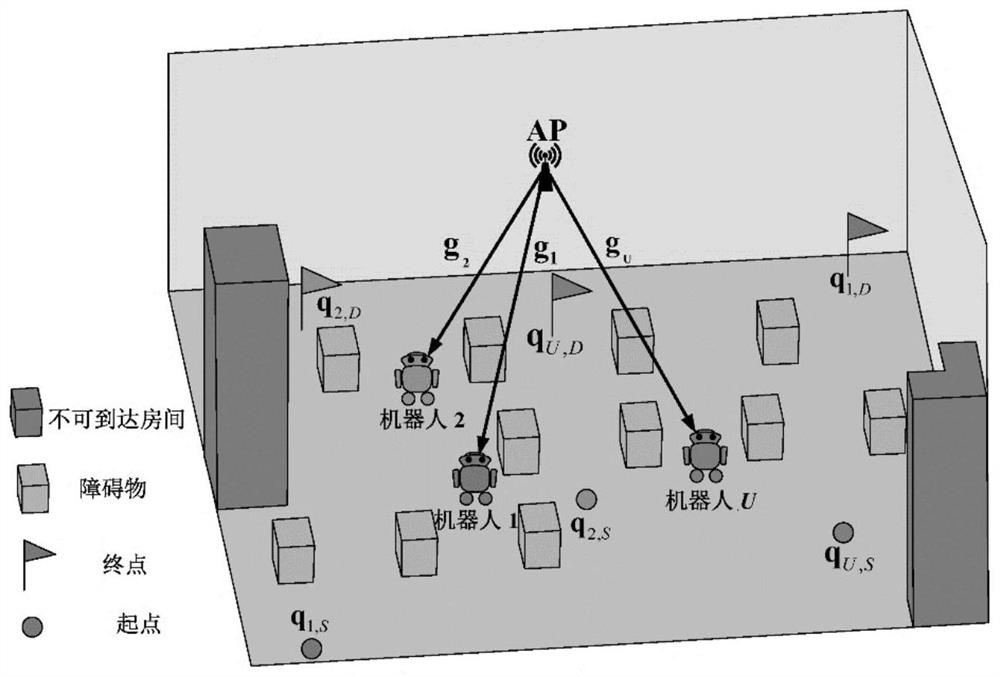
[0029] Specific implementation manner 1. Combination figure 1 and figure 2 Describe this embodiment, the robot communication control method based on federated reinforcement learning, the robot communication control method based on federated reinforcement learning described in this embodiment can be applied to any robot system that needs to perform path planning and transmit power allocation of access points , and, in the system, the reinforcement learning device at least includes: at least one robot and an access point.
[0030] It should be noted that the executive body of the robot communication control method based on federated reinforcement learning provided in this embodiment may be a control device, and the control device may be installed on the robot, or may be an independent device deployed outside the robot, The operation of the robot can be controlled by wireless signals; the control device can be a microcomputer, a processor, a mobile phone and other devices. In ...
specific Embodiment approach 2
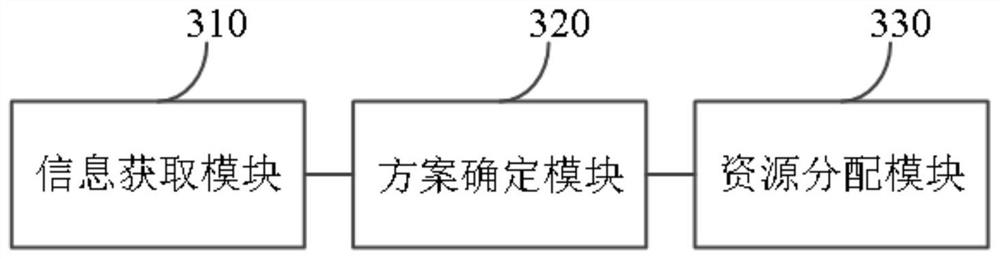
[0094] Specific embodiment 2. Combination image 3 Describe this embodiment, a robot communication control system based on federated reinforcement learning, the system is applicable to the robot communication control method based on federated reinforcement learning described in Embodiment 1, and the system includes an information acquisition module, a scheme determination module and a resource allocation module;
[0095] an information acquisition module 310, configured to acquire the geographic location and current downlink channel gain of each robot in the reinforcement learning device at each moment;
[0096] The scheme determination module 320, based on the federated deep reinforcement learning method, determines the target resource allocation scheme of the current model; wherein, the target resource allocation scheme includes: indoor robot path planning and transmission power allocation of access points;
[0097] The resource allocation module 330 is used to control the r...
specific Embodiment approach 3
[0101] Specific embodiment three, combination Figure 4 Illustrating this embodiment, a control device includes a processor 401, a communication interface 402, a memory 403, and a communication bus 404, wherein the processor 401, the communication interface 402, and the memory 403 communicate with each other through the communication bus 404,
[0102] a memory 403 for storing computer programs;
[0103] The processor 401 is configured to implement the steps of the federated deep reinforcement learning-based indoor robot path planning and access point transmit power allocation method described in the first embodiment when executing the program stored in the memory 403 .
[0104] In this implementation manner, the communication bus mentioned by the control device may be a Peripheral Component Interconnect (PCI) bus or an Extended Industry Standard Architecture (EISA) bus or the like. The communication bus can be divided into an address bus, a data bus, a control bus, and the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com