

Knee joint exoskeleton man-machine posture deviation identification method and device based on subspace
An identification method and attitude deviation technology, applied in the field of exoskeleton, can solve the problems of installation position and measurement accuracy, and achieve the effect of accurate calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
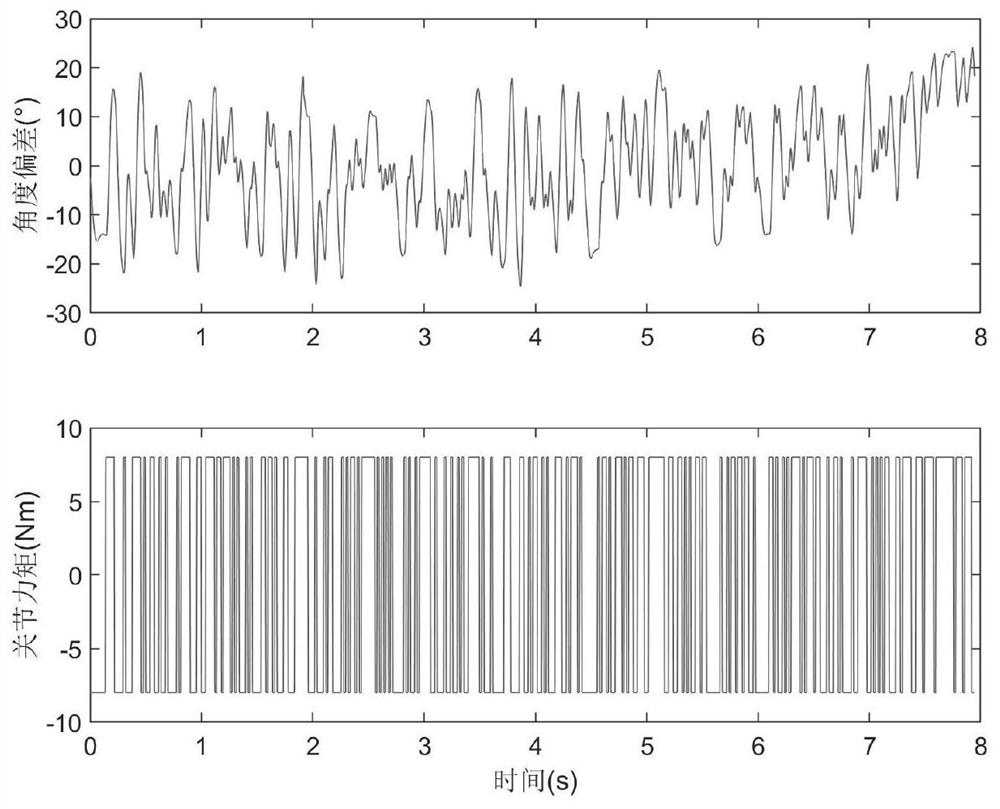
[0062] In the human body posture estimation method in the wearable exoskeleton state in the prior art, when the input signal adopts a pseudo-random binary signal PRBS (Pseudo-Random Binary Sequence, pseudo-random binary sequence), the signal input range is [-8Nm, 8Nm] , the obtained output response data curve is as follows figure 2 shown. from figure 2 It can be found that when the input is ±8Nm (Nm), the maximum deviation betw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More