

Method, device and system for controlling motion of tail end of cantilever crane, medium and engineering machinery
A motion control device and motion control technology, applied in the field of system, control method of boom end motion, medium and engineering machinery, device, can solve the problems of complex operation, unintuitive manipulation of the trajectory movement of the end of the boom, etc., and achieve intuitive operation convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
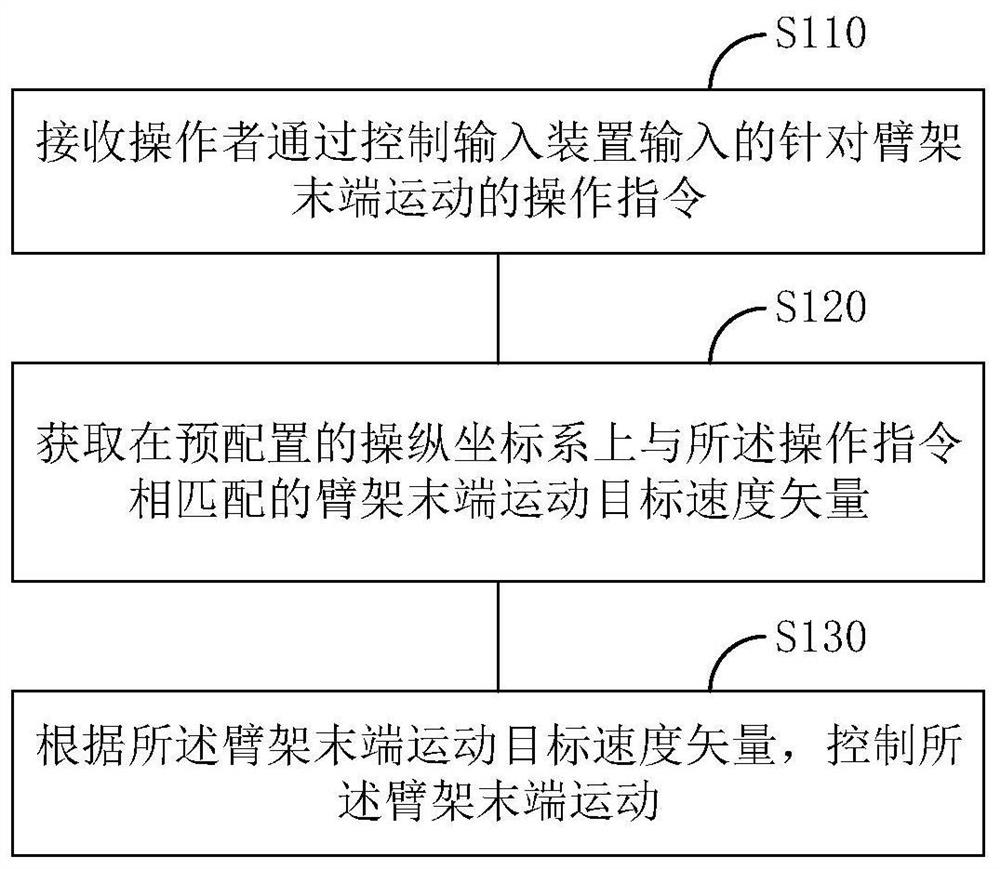
[0038] figure 1 This is a schematic flowchart of the motion control method of the boom end according to the first embodiment of the present invention, wherein the boom is, for example, the boom of a pump truck, and the corresponding boom end is, for example, where the distribution point of the pump truck is located.
[0039] like figure 1 As shown, the motion control method may include steps S110-S120 of the following steps:
[0040] Step S110, receiving an operation instruction for the movement of the end of the boom that is input by the operator through the control input device.
[0041] Step S120, acquiring the boom end moving target velocity vector matching the operation instruction on the preconfigured manipulation coordinate system.
[0042] Step S130: Control the movement of the boom end according to the target velocity vector of the boom end movement.
[0043] For step S110, the operation instruction is used to show how the operator manipulates the control input dev...
example 1
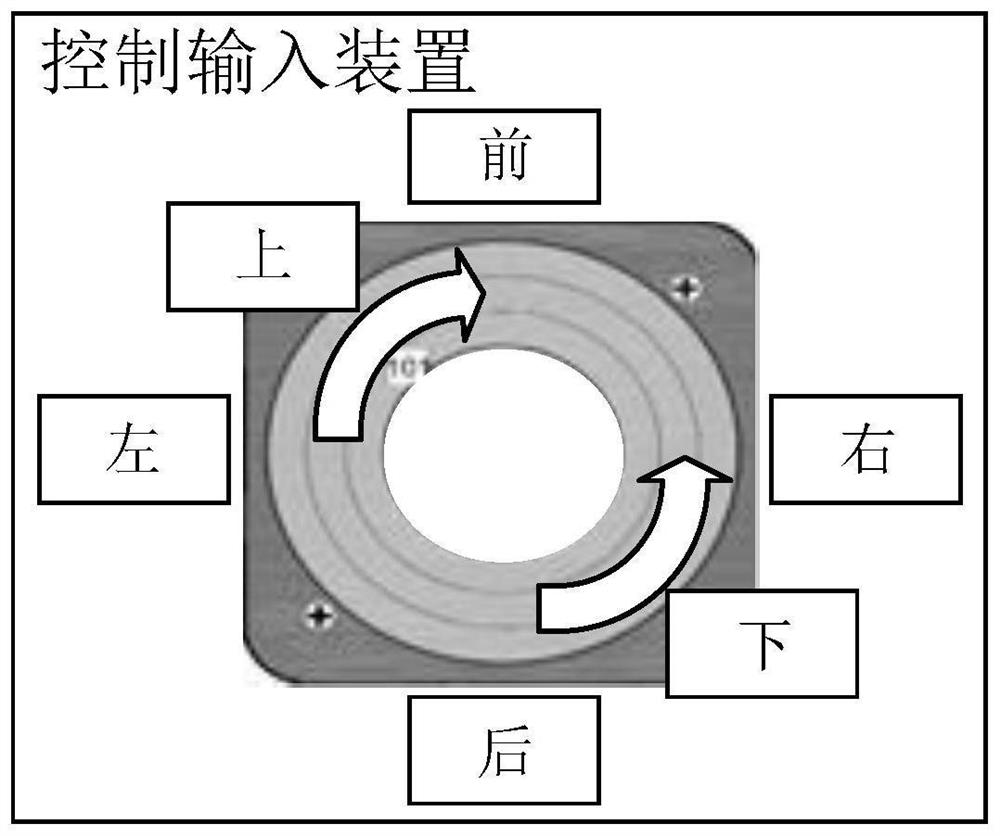
[0048] Example 1: As shown in Figure 2(a), the remote control is configured with a single joystick. By moving the joystick up and down, left and right, and forward and reverse rotations, the three groups of operations of front and rear, left and right, and up and down can be realized respectively. .
example 2
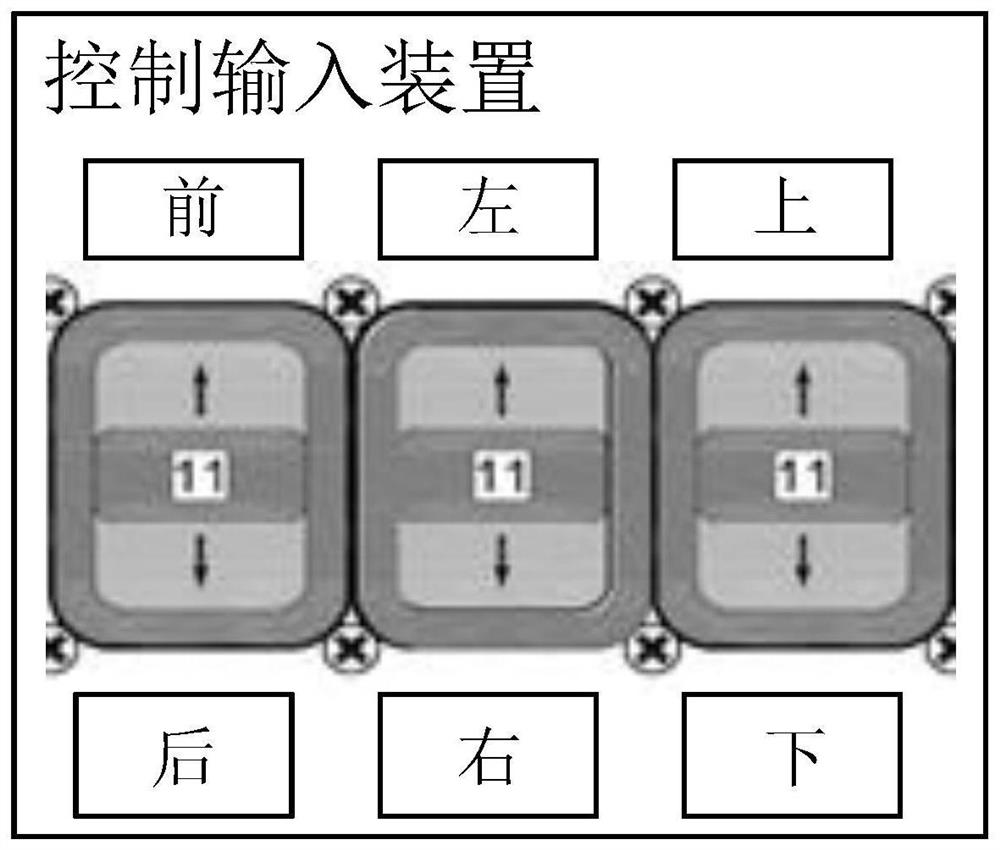
[0049] Example 2: As shown in Figure 2(b), the remote control is configured with three levers, and the down-and-down movements of the three levers correspond to the three groups of directions: front and rear, left and right, and up and down.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More