Parallel flexible cable driven upper limb rehabilitation robot capable of realizing fixed-point output of flexible cables
A rehabilitation robot and cable-driven technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as the incomplete constraint characteristics of upper limb rehabilitation robots, the difficulty of realizing position control and force control, and the change of output points of flexible cables, etc., to achieve Not easy to interfere, complete constraint characteristics, avoid friction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
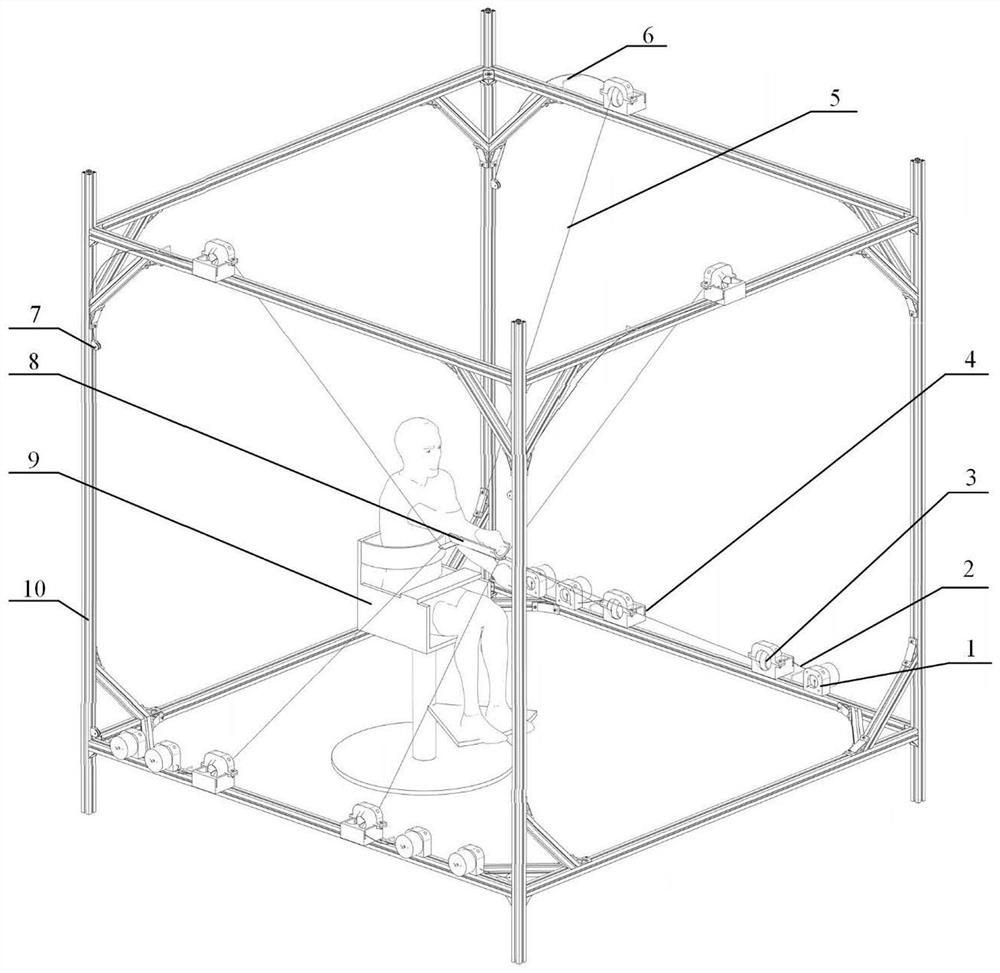
[0036] combined with figure 1 , to further describe the present invention:
[0037]A parallel flexible cable-driven upper limb rehabilitation robot mentioned in the present invention, which can realize flexible cable fixed-point output, includes a drive module 1, a casing 2, a ball guide wheel 3, a ball guide wheel fixing frame 4, a flexible cable 5, and a casing support 6. Passing wheel 7, catwalk 8, seat 9, and support frame 10 realize six-degree-of-freedom movement of the patient's upper limb space through seven flexible cables 5, and at the same time realize flexible cables 5 Spatial fixed-point output.
[0038] The drive module 1 is provided with seven groups, which are collectively installed at the bottom of the support frame 10, and can also be arranged arbitrarily according to actual needs; according to different layout forms, the flexible cable 5 is output from the drive module 1, and can be transmitted to the The ball guide wheel 3, the support frame 10 is equipped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com