Distributed online adaptive task planning method for unmanned aerial vehicle group
A mission planning, UAV technology, applied in vehicle position/route/altitude control, instruments, 3D position/channel control, etc., can solve the target damage ability without considering the UAV's bomb load, and cannot achieve the mission planning effect and other problems to achieve the effect of reducing the existence time, improving efficiency and reducing interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
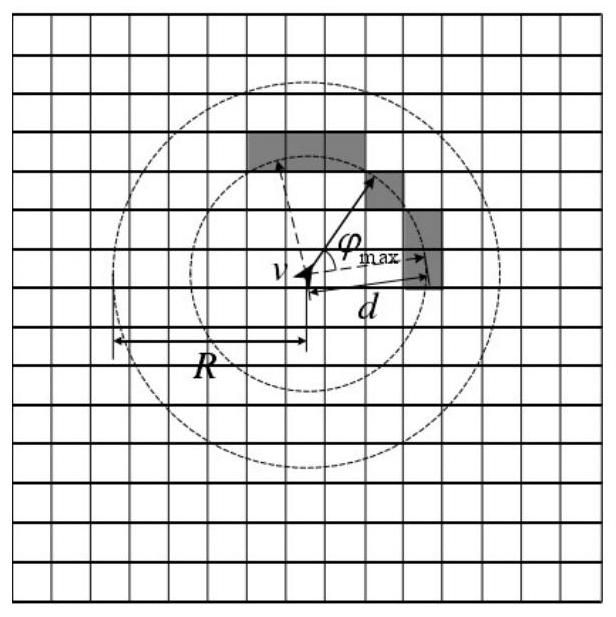
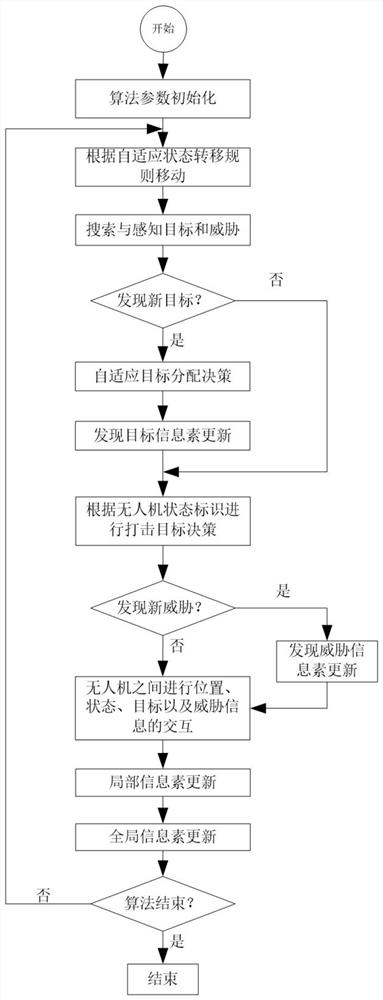
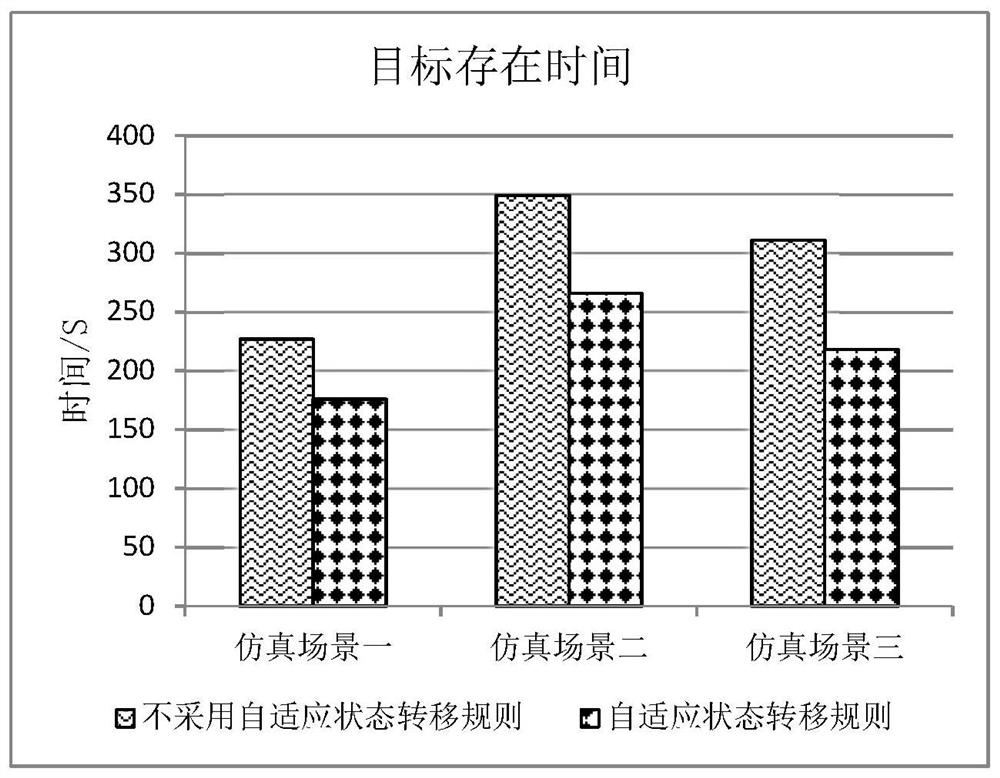
[0108] The present invention aims to propose a distributed online self-adaptive mission planning method for UAV swarms, aiming at the problem of cooperative reconnaissance and strike autonomous mission planning for a certain key combat area by a UAV swarm composed of dozens of UAVs. Treat each UAV as an independent individual, assign an independent processor, build its own problem solution, make decisions about the movement of each step, and exchange information between UAVs on the position and the grasp of the target, so as to realize each The UAV grasps the overall state of the system, and by adaptively selecting state transition rules and target allocation decisions based on the UAV’s strikes on targets in a local area, the overall optimal task planning effect can be obtained, and the entire UAV can be improved. The efficiency of machine cluster search and strike task execution includes the following steps:
[0109] A. Initialization:
[0110] Discretely quantify the task ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com