

Passive wire climbing type aerial cable cleaning aerial robot online operation device
A technology of aerial robots and operating devices, which is applied to overhead lines/cable equipment, aircraft, motor vehicles, etc., and can solve problems such as fire, line damage, and poor safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
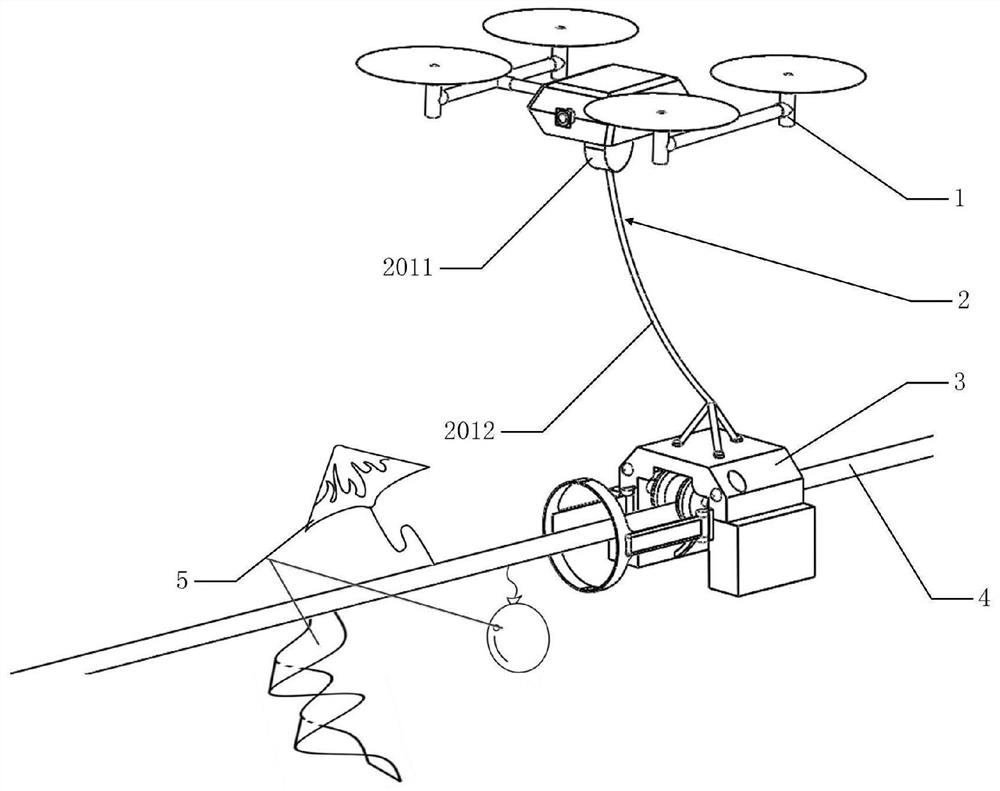
[0043] Embodiment 1: as figure 1 , figure 2 and Figure 5 to Figure 9 As shown, a passive climbing type overhead cable cleaning aerial robot online operation device consists of an online operation body, a device interface 301, a tool interface 302, a tool turret 303, a counterweight 304, an observation camera 305, and a semi-circular blade 306, a passive roller 307, an electric buckle 308 and a guide rod 309 are formed; the tool interface 302 is located at both sides of the online operation body of the online operation device 3, and can be connected with various cleaning tools; there are two tool turrets 303, located on the line Two half-ring blades 306 are respectively connected to the front of the online working body of the upper working device 3 .
[0044] The device interface 301 is a rope interface 3012 connected to the rope 2012 in the traction mechanism 2. There are three rope interfaces 3012, which are distributed in an equilateral triangle on the online working bod...
Embodiment 2
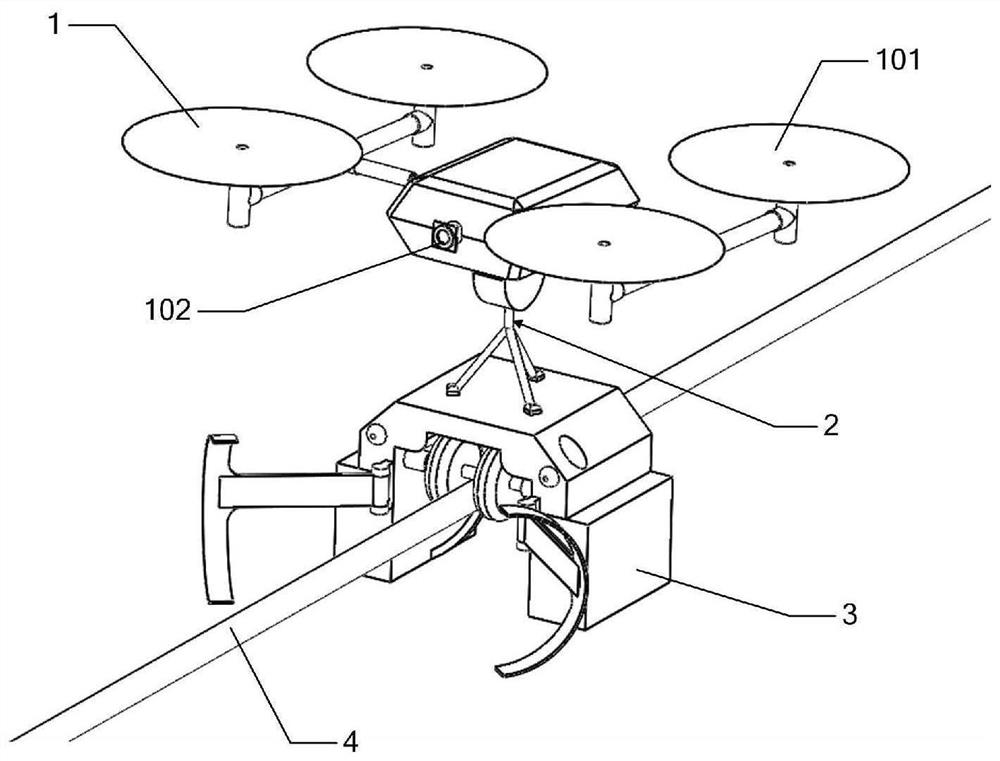
[0055] Embodiment 2: as figure 1 , figure 2 and Figure 5 to Figure 9 As shown, a passive cable-climbing overhead cable cleaning aerial robot includes a flying platform 1, a traction mechanism 2, and an online operation device 3; the flying platform 1 has a tiltable rotor 101 and a pan-tilt camera 102; the traction mechanism 2 One end is installed under the flight platform 1, and the other end is connected to the online operation device 3; the online operation device 3 is composed of an online operation body, a device interface 301, a tool interface 302, a tool turret 303, a counterweight 304, an observation camera 305, a half Annular blade 306, passive roller 307, electric buckle 308 and guide bar 309 are formed; Tool interface 302 is positioned at the both sides of the line work body of line work device 3, can connect various cleaning tools; Tool turret 303 has two, Located in front of the online working body of the online working device 3, two semi-circular blades 306 ar...
Embodiment 3
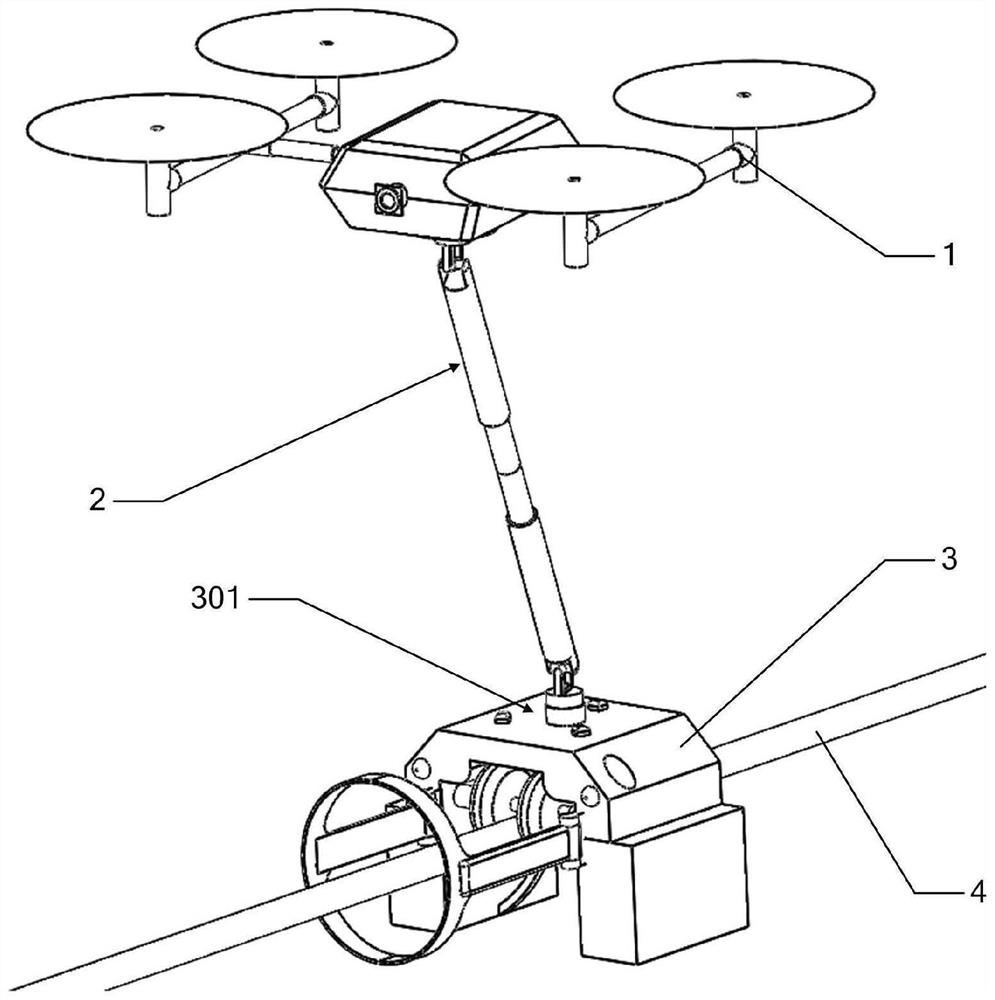
[0067] Embodiment 3: as image 3 and Figure 4 ~ Figure 9 As shown, a passive cable-climbing overhead cable cleaning aerial robot includes a flying platform 1, a traction mechanism 2, and an online operation device 3; the flying platform 1 has a tiltable rotor 101 and a pan-tilt camera 102; the traction mechanism 2 One end is installed under the flight platform 1, and the other end is connected to the online operation device 3; the online operation device 3 is composed of an online operation body, a device interface 301, a tool interface 302, a tool turret 303, a counterweight 304, an observation camera 305, a half Annular blade 306, passive roller 307, electric buckle 308 and guide bar 309 are formed; Tool interface 302 is positioned at the both sides of the line work body of line work device 3, can connect various cleaning tools; Tool turret 303 has two, Located in front of the online working body of the online working device 3, two semi-circular blades 306 are respectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More