

A Compliant Control Method of Robot Joint Servo Motor
A robot joint and compliance control technology, which is applied in the direction of motor generator control, motor control, AC motor control, etc., can solve the problems of slow system adjustment time and overshoot, so as to solve the problem of overshoot, reduce dynamic adjustment time, Effect of Improving Dynamic Scaling Performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
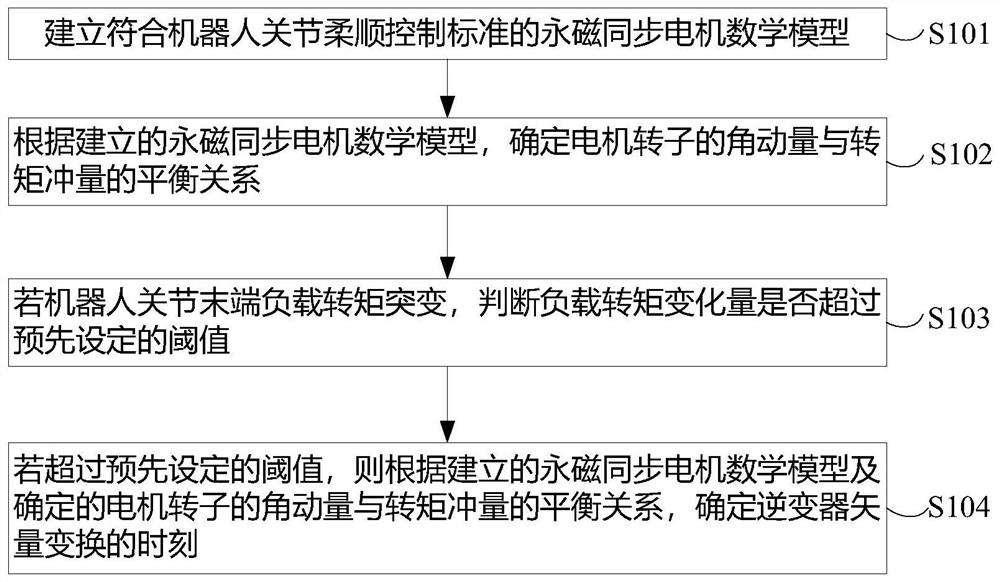
[0061] like figure 1 As shown, the embodiment of the present invention provides a robot joint servo motor compliance control method, the method includes:
[0062] S101, establishing a permanent magnet synchronous motor mathematical model that meets the robot joint compliance control standard;
[0063] S102, according to the established mathematical model of the permanent magnet synchronous motor, determine the balance relationship between the angular momentum of the motor rotor and the torque impulse;
[0064] S103, if the load torque at the end of the robot joint changes suddenly, determine whether the load torque variation exceeds a preset threshold;
[0065] S104, if the preset threshold value is exceeded, determine the time for i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More