

Lane changing trajectory planning method considering vehicle dynamics
A vehicle dynamics and trajectory planning technology, applied in the field of vehicles, can solve the problems of difficult trajectory tracking of vehicles, tortuous paths, and lack of lane-changing trajectories, so as to ensure vehicle stability, satisfy comfort, and smooth lane-changing trajectories. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention is further described below in conjunction with the accompanying drawings of the description, as shown in the figure:
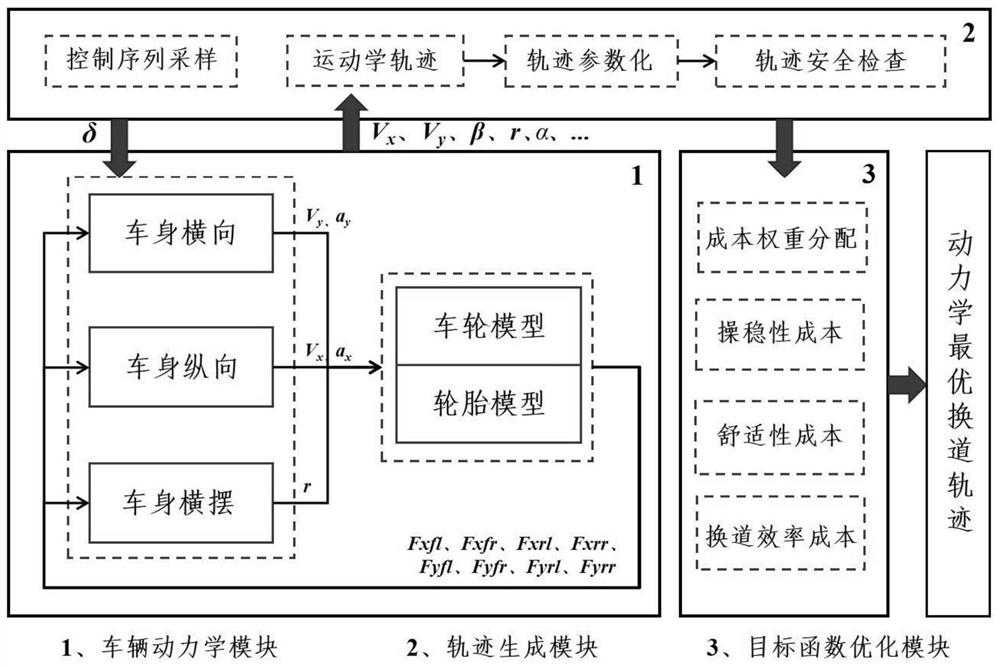
[0041] The lane-changing trajectory planning method considering vehicle dynamics of the present invention comprises the following steps:
[0042] S1. Set the planning cycle sequence (τ 0 ,τ 1 ,...,τ i ,...,τ n-1 ); wherein, n is a positive integer;
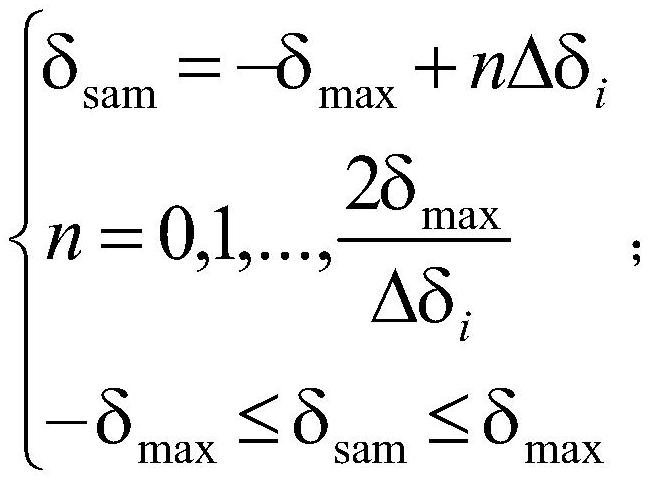
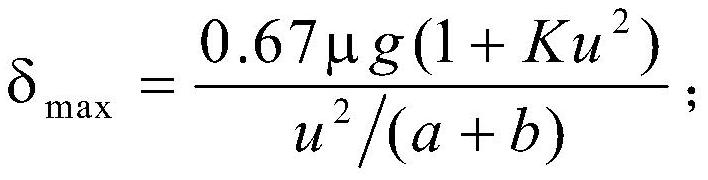
[0043] S2. During the planning period τ 0 Inside, collect the front wheel angle information when the vehicle changes lanes and form the front wheel angle sequence;
[0044] S3. Process the front wheel rotation angle sequence according to the principle of vehicle dynamics to obtain the state information of the vehicle; wherein, the vehicle dynamics is vehicle dynamics with seven degrees of freedom; the seven degrees of freedom include lateral, longitudinal and yaw motions And 4 wheels rotate; Described vehicle dynamics principle adopts prior art, repeats no more here;
[0045] S4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More