Assembled multi-legged robot with variable foot end tracks and control method
A multi-legged robot and assembled technology, applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., can solve the problems of non-adjustable, fixed structure, low flexibility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
[0037] The present invention will be further described below in conjunction with the accompanying drawings.
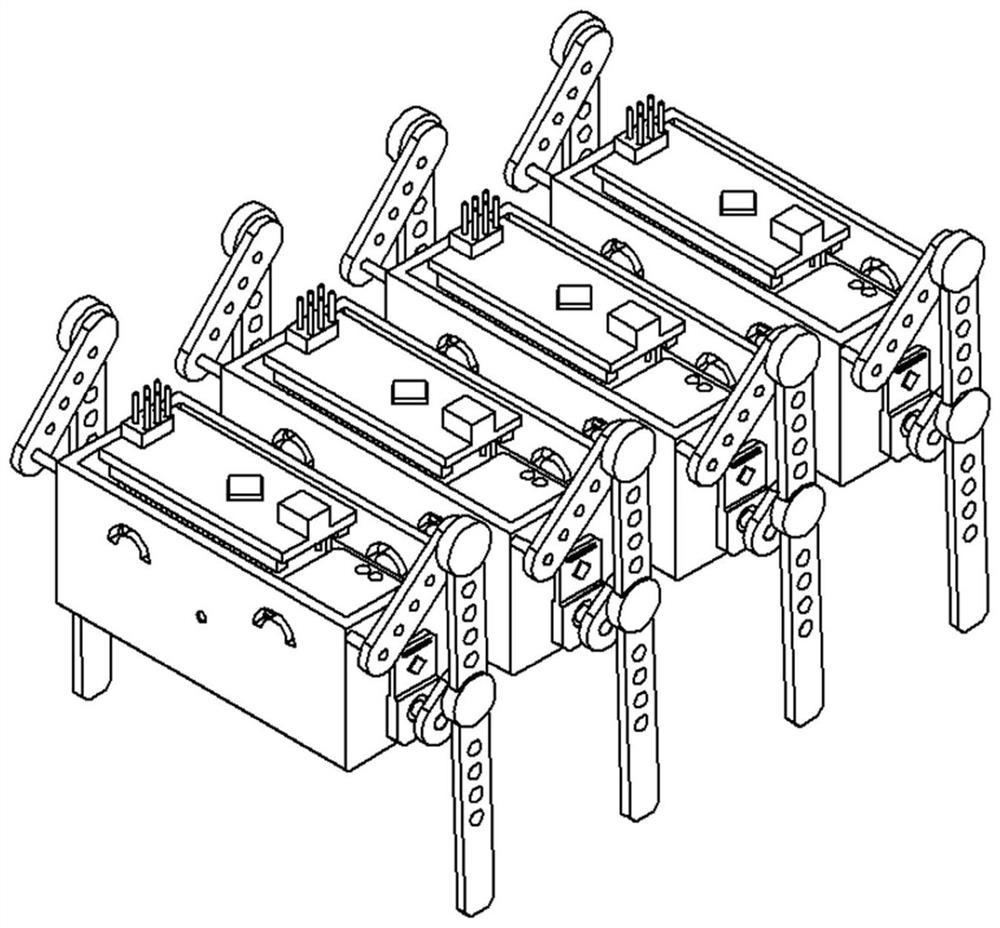
[0038] Such as figure 1 As shown, the present invention provides an assembled multi-legged robot with variable foot trajectory. The multi-legged robot is formed by joining several robot monomers through magnetic balls. figure 1 Examples of four robotic monoliths are given.
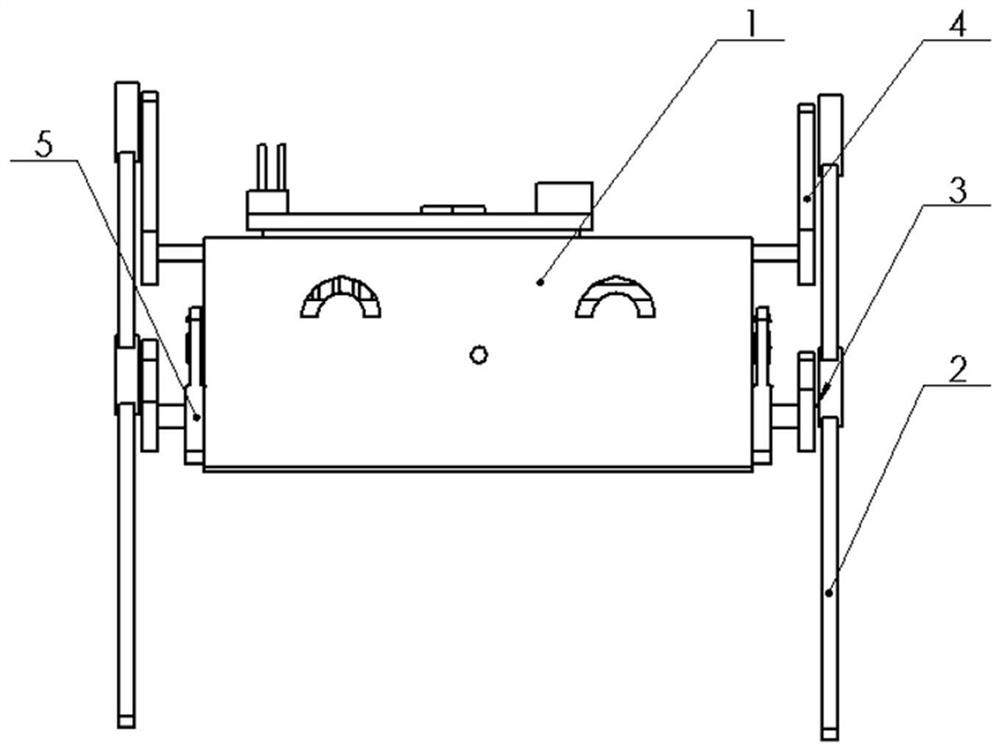
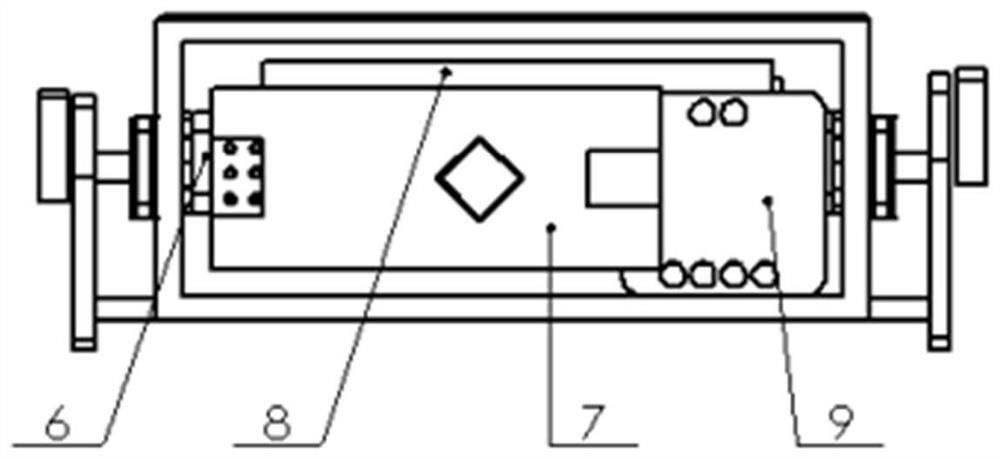
[0039] Such as Figure 2-4 As shown, each single robot includes a main body 1, a DC motor 6, a DC motor drive board 9, a mechanical foot, a rotation angle potentiometer 5, a controller 7 and a power supply 8; the structure of the main body 1 can be made by 3D printing.
[0040] The DC motor 6 is embedded and mounted on the left and right sides of the main body 1, controlled by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com