Unmanned ship composite task allocation method and system
A technology of composite tasks and distribution methods, which is applied in the field of composite task distribution methods and systems of unmanned boats, and can solve problems such as lack of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0059] A kind of unmanned boat composite task allocation method based on asynchronous consensus bundling auction algorithm provided by this embodiment is a kind of multi-task (one unmanned boat needs to complete multiple tasks)-multi-robot (one task needs multiple unmanned boats to complete) )-time extension allocation (the unmanned vehicle must complete the task sequentially) allocation method.
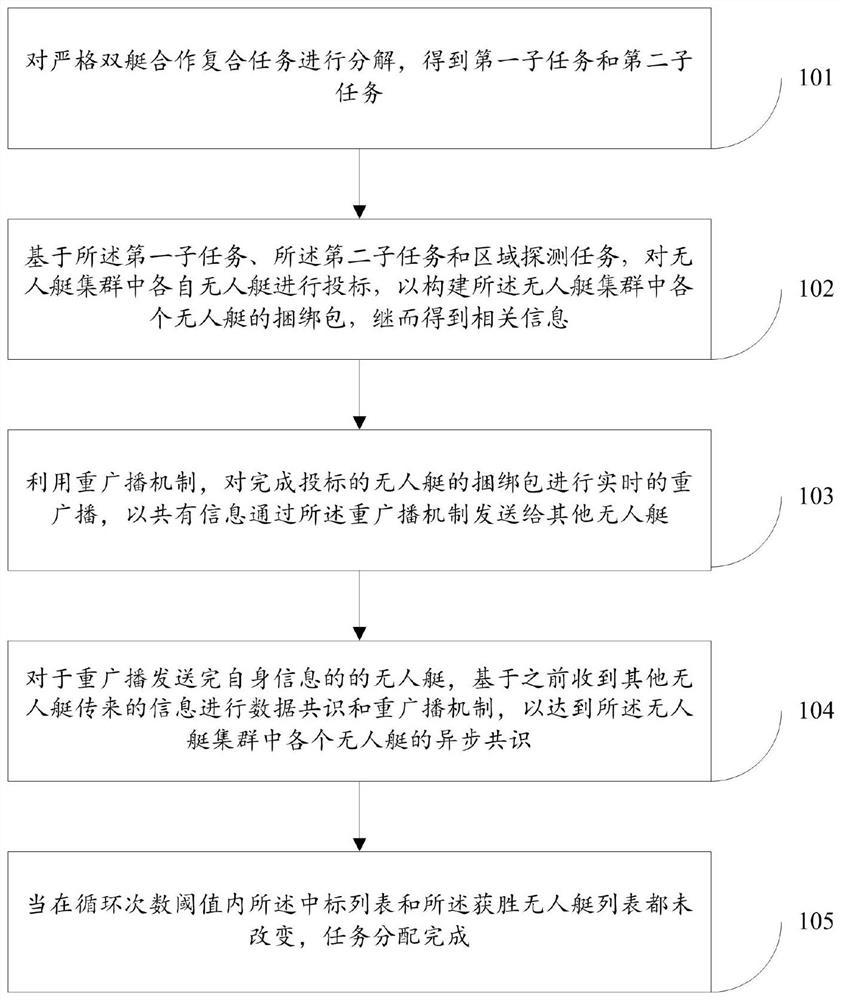
[0060] See figure 1 , the present embodiment provides a method for allocating unmanned boat composite tasks based on the asynchronous consensus bundling auction algorithm, comprising the following steps:
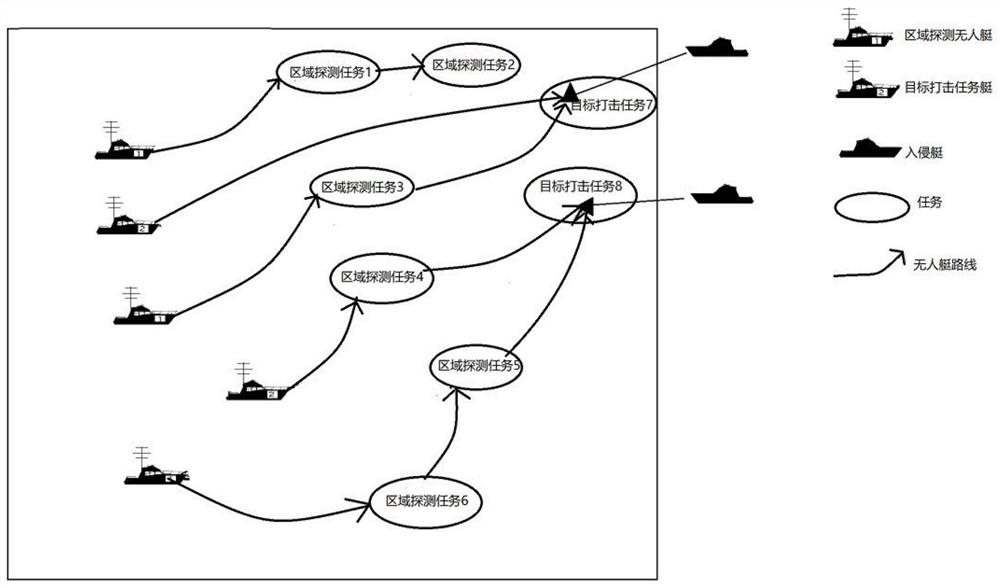
[0061] Step 101: Decompose the strict two-boat cooperation composite task to obtain the first subtask and the second subtask; the unmanned boats in the unmanned boat cluster include area detection unmanned boats and target strike unmanned boats; the first subtask The task is performed by the area detection unmanned boat, and the second subtask is performed by the target strike unm...
Embodiment 2
[0094] This embodiment provides a method for allocating composite tasks of unmanned boats based on an asynchronous consensus bundling auction algorithm, including the following steps:
[0095] (1) Decompose the scoring scheme for the compound task (two-boat task):
[0096] Score ikj =∑ j∈RD ∑ i∈I1 ∑ k∈I2 (c ij x ij +c kj x kj )[x ij x kj ]
[0097] Among them, RD represents the dual-ship cooperative compound task, I1 represents the area detection UV, I2 represents the target strike UV, c ij Indicates the score assigned by task j to unmanned vehicle i, x ij = 1 means task j is successfully assigned to unmanned boat i, x ij = 0 means unallocated, Score ikj Indicates the score of the dual-boat composite mission j being jointly executed by the area detection UAV i and the target strike UAV k. [x ij x kj ] means that only after the two subtasks of the double-boat composite task j are successfully assigned, the assignment of the composite task is considered successfu...
Embodiment 3
[0147] The present embodiment provides a kind of unmanned ship composite task distribution system, comprising:
[0148] The decomposition module is used to decompose the strict double-boat cooperation composite task to obtain the first subtask and the second subtask; the unmanned boats in the unmanned boat cluster include area detection unmanned boats and target strike unmanned boats; One subtask is performed by the area detection unmanned boat, and the second subtask is performed by the target strike unmanned boat; the composite task of strict two-boat cooperation is a target interception strike task.
[0149] The construction module is used to bid for each unmanned boat in the unmanned boat cluster based on the first subtask, the second subtask and the area detection task, so as to build each unmanned boat in the unmanned boat cluster bundle, and then obtain relevant information; the area detection task is performed by the area detection unmanned boat or the target strike un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More