

Hydraulic actuator for hydraulic foot type robot
A hydraulic actuation and robot technology, which is applied in the direction of motor vehicles, manipulators, manufacturing tools, etc., can solve the problems of uncontrollable variable stiffness, impact force buffering and low impact energy recovery and reuse ability, so as to increase adaptability and improve mechanism Life, impact reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
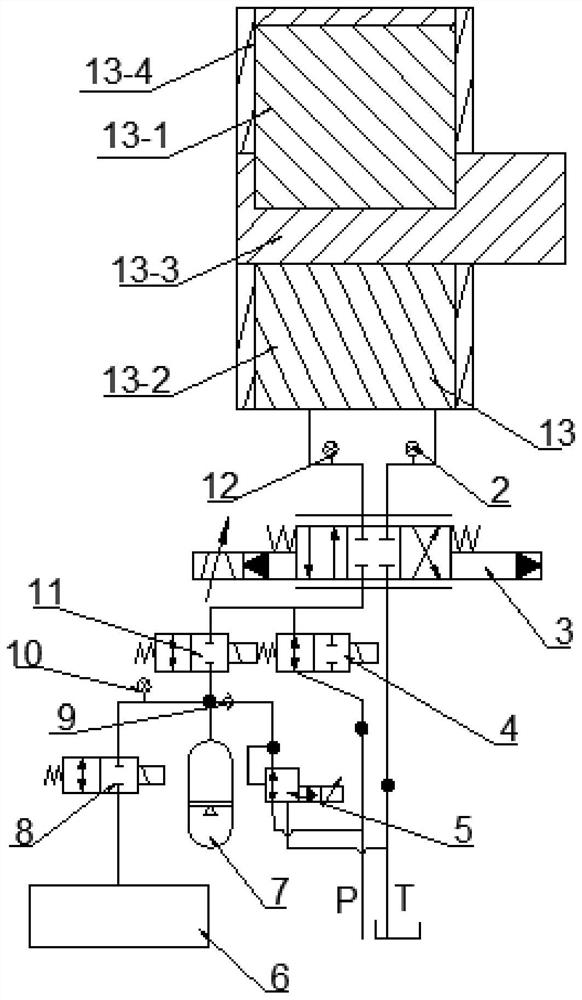
[0023] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment, a hydraulic actuator for a hydraulic foot robot in this embodiment, which includes a hydraulic actuator and a hydraulic unit;
[0024] The hydraulic actuator is located above the hydraulic unit;
[0025] The hydraulic unit includes servo valve 3, No. 1 high-speed switching valve 4, electromagnetic pressure reducing valve 5, other hydraulic system components 6, accumulator 7, No. 3 high-speed switching valve 8, No. 2 high-speed switching valve 11 and high-pressure oil source P;
[0026] The nozzles of the two upper oil circuits of the servo valve 3 are respectively connected to the oil inlet and the oil outlet of the hydraulic actuator, and one lower oil circuit of the servo valve 3 is provided with a parallel connection with the upper oil circuit of No. 1 high-speed switching valve 4. The upper oil circuit of the No. 2 high-speed on-off valve 11, the lower oil circuit of the No. ...
specific Embodiment approach 2
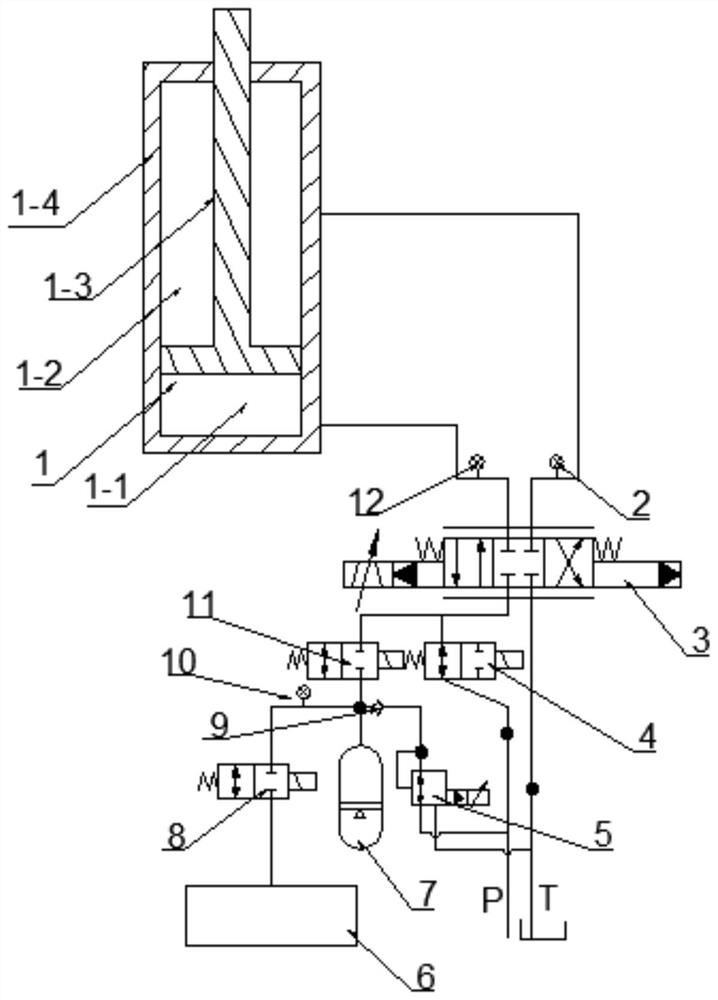
[0029] Specific implementation mode two: combination Figure 1 to Figure 5 Describe this embodiment, it also comprises low-pressure fuel tank T of this embodiment,
[0030] The other lower end oil circuit of the servo valve 3 is provided with a low pressure oil tank T connected in parallel with the upper end oil circuit of the high pressure oil source P.
[0031] Others are the same as the first embodiment.
specific Embodiment approach 3
[0032] Specific implementation mode three: combination Figure 1 to Figure 5 Describe this embodiment, it also comprises check valve 9 of this embodiment,
[0033] A check valve 9 is arranged on the connecting pipeline between the upper end oil circuit of the electromagnetic pressure reducing valve 5 and the oil circuit of the accumulator 7 .
[0034] Others are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More