

Unmanned aerial vehicle bee colony countering method based on swarm cooperation information
A technology of drone swarming and countermeasures, which is applied in the field of drone swarm countermeasures based on group collaborative information, can solve the problems of strict requirements for detection equipment, weak saturation attacks, and inability to effectively complete drone swarm interception, etc. , to achieve the effects of improving launch angle accuracy and aiming position accuracy, high attack angle and aiming position accuracy, and high attack efficiency and counter-success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
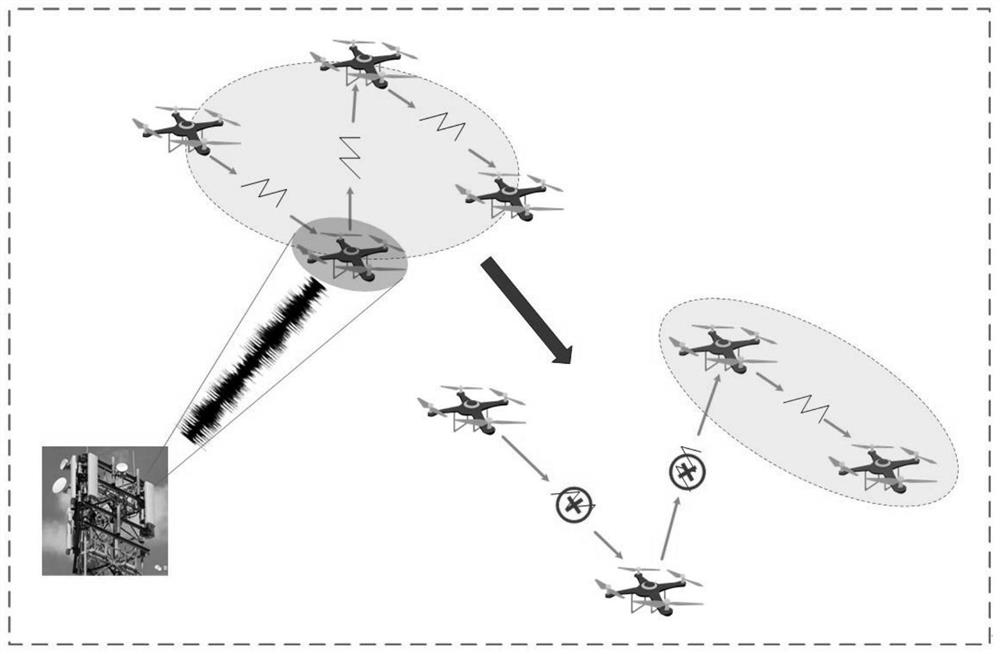
[0110] Embodiment 1: For the unmanned aerial vehicle swarm based on visual information coordination, the unmanned aerial vehicle collects terrain data through the airborne visual sensor and carries out autonomous positioning; detects the position of other unmanned aerial vehicle through visual ability and carries out intelligent cooperation. This type of UAV swarm does not require traditional GNSS signals and does not rely on navigation information. Traditional navigation countermeasures cannot effectively counter this type of UAV swarm.
[0111] Such as Figure 4 As shown, UAV A collects images and terrain data in real time, and performs scene matching and terrain matching with the offline satellite orthophoto library and elevation library, so as to realize autonomous navigation based on visual information perception; at the same time, it detects UAVs through visual sensors The relative position of B and C, calculate the azimuth and distance information of UAV B, C and itself...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More