Unmanned aerial vehicle reconnaissance task planning method and device based on genetic algorithm
A genetic algorithm and unmanned aerial vehicle technology, applied in computer equipment and storage media, in the field of genetic algorithm-based reconnaissance mission planning for unmanned aerial vehicles, can solve problems such as deficiencies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
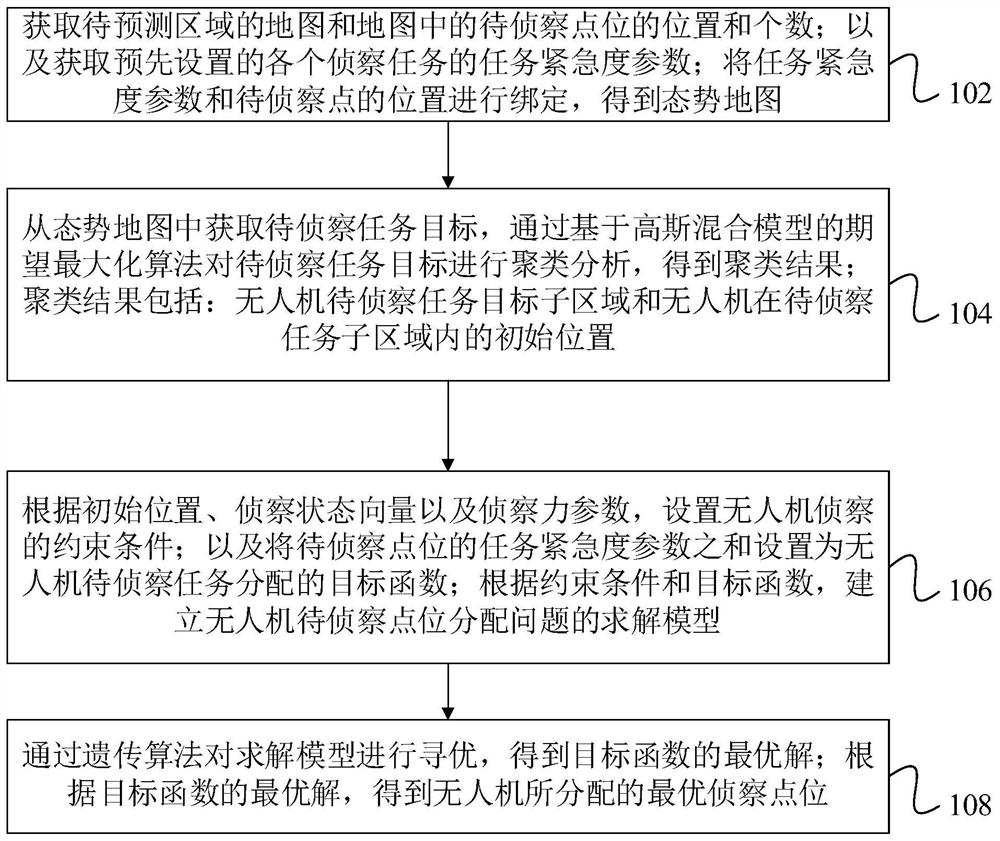
[0057] In one embodiment, such as figure 1 As shown, a genetic algorithm-based UAV reconnaissance task planning method is provided, including the following steps:
[0058] Step 102, obtaining the map of the area to be predicted and the location and number of points to be reconnaissed in the map; and obtaining the task urgency parameters of each reconnaissance task preset; OK, get the situation map.
[0059] The situation map refers to the map that reflects the development trend and provides services for timely analysis and decision-making. The continuous reconnaissance m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More