

Closed-loop control six-axis mechanical arm and control method thereof
A six-axis robotic arm and closed-loop control technology, which is applied in the direction of program-controlled manipulators, manipulators, claw arms, etc., can solve the problems of high cost, difficulty in large-scale development of industrial robot education and teaching, and expensive robots. Accurate motion parameters and improved control efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
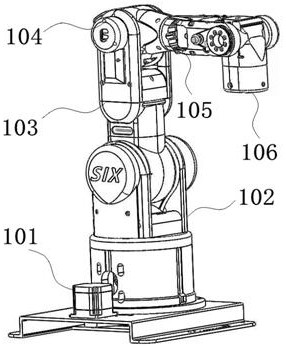
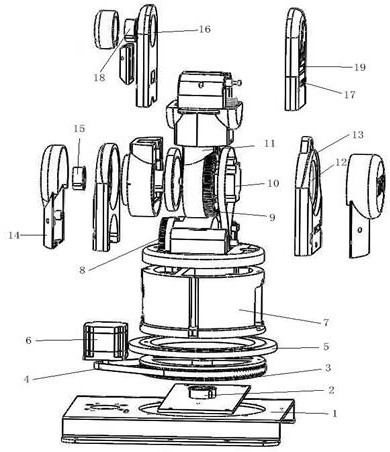
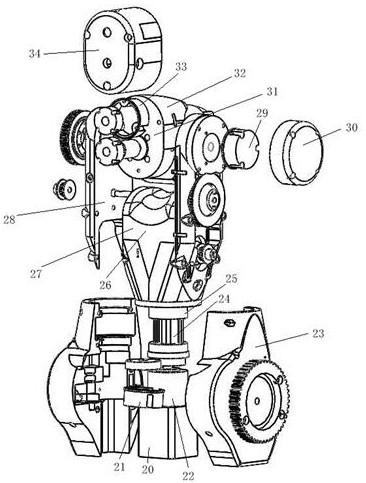
[0024] Embodiment 1: as Figure 1-5 As shown, a closed-loop controlled six-axis mechanical arm includes a metal plate base 1, an encoder assembly, and each mounting assembly, each mounting assembly is installed on the metal plate base 1, and the encoder assembly is installed on each mounting assembly;
[0025] Each mounting assembly includes one shaft and its components 101, two shafts and its components 102, three shafts and its components 103, four shafts and its components 104, five shafts and its components 105, six shafts and its components 106; The component 101 is rotatably installed above the metal plate base 1, the second axis and its components 102 are rotatably installed above the first axis and its component 101, the three axis and its component 103 are rotatably installed above the second axis and its component 102, and the four axis and its component 104 is rotatably installed above the three-axis and its assembly 103, the five-axis and its assembly 105 are rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More