

Underwater unmanned cable-free operation type robot
A robot and operation technology, which is applied to underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of increasing its own resistance, poor endurance, and large resistance, so as to increase the operating range, improve the operating range, and reduce water resistance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example
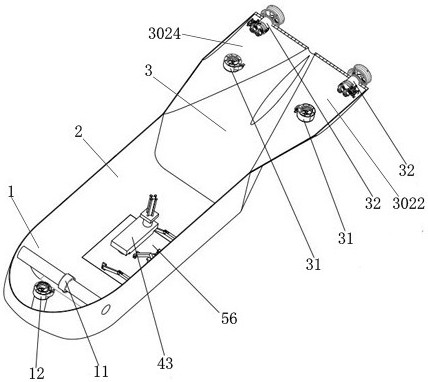
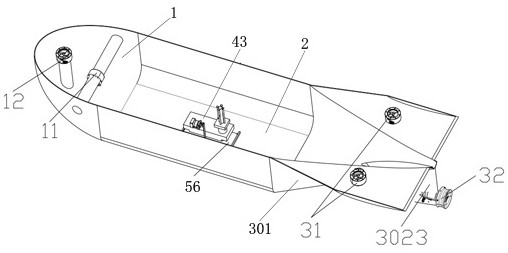
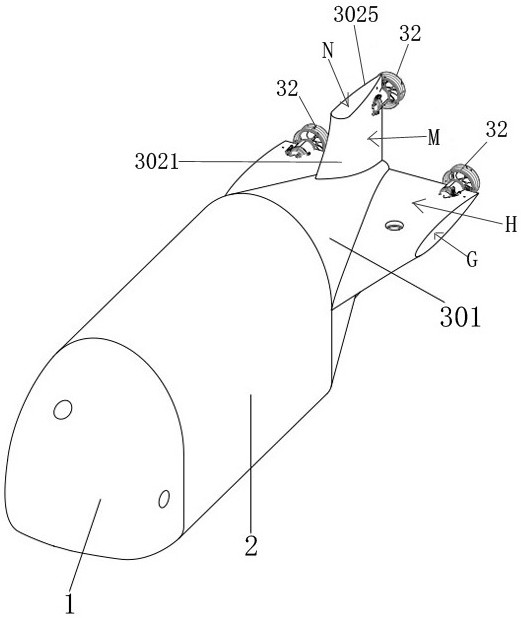
[0040] An underwater unmanned cable-free operation robot, comprising a bow 1, a middle 2 and a stern 3, the bow 1, the middle 2 and the stern 3 are all hollow structures, the bow, the middle and the stern of the present invention The hollow structure of the stern can ensure the pressure balance inside and outside, so that the present invention can generally be applied to a water depth of 500 meters. The length A of the bow is 750 to 1000mm, the length of the present embodiment refers to the size of the front and rear directions of the bow 1 to the stern 3, and the width is the size of the left and right; the horizontal section of the bow is a semi-ellipse, and its length The axis is a is 2*A, the major axis is the up-down direction, the minor axis b is 1.2*A to 1.5*A, and the minor axis is the left-right direction; the cross-section of the connection between the bow and the middle part is a curved surface structure with an upper half ellipse and a lower rectangle , where the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More