

Flexible continuum structure capable of being integrally driven and flexible mechanical arm
An integral drive, continuum technology, applied in the field of flexible manipulators, can solve problems such as complex structure, and achieve the effect of simple principle, high reliability, and high degree of freedom configuration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
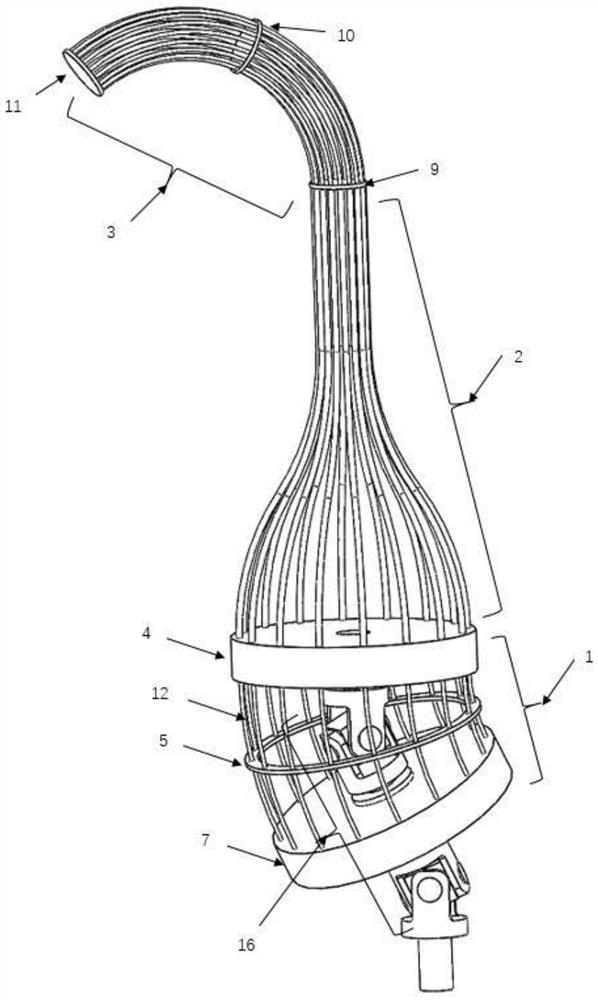
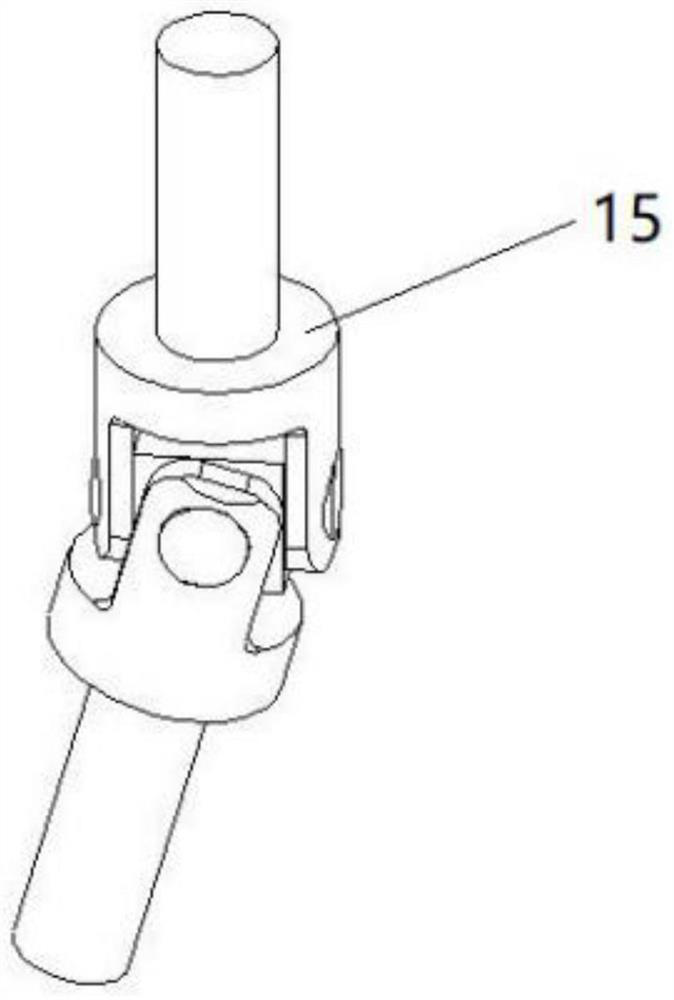
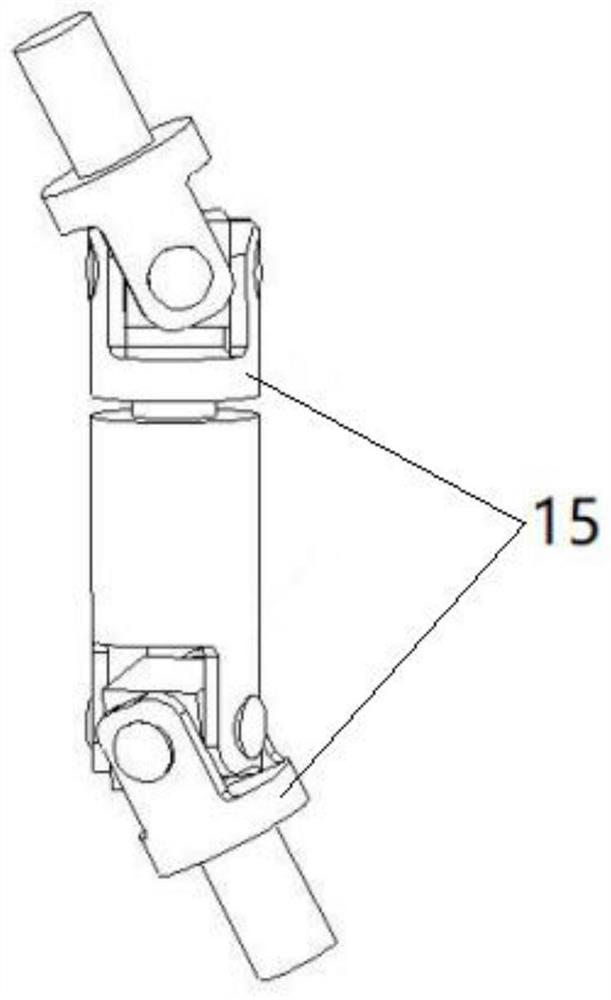
[0048] Such as Figure 1 to Figure 3 As shown, the drive connection part 16 in this embodiment may include one universal joint 15 or a plurality of universal joints 15 connected in series, one end of the drive connection part 16 is connected to the proximal base plate 4, and the other end of the drive connection part 16 passes through Pass the proximal stop disc 7 and connect with the proximal stop disc 7, the part of the drive connection part 16 located on the proximal side of the proximal stop disc 7 forms a free end connected to the external drive mechanism, and the drive connection part 16 is driven to move by the drive mechanism, Drive the proximal stop disc 7 to move and overturn, realize the pushing and pulling of the structural bone 12, and thus realize the bending of the distal continuum 3 along different directions in space.
[0049] In the first case, if figure 2 As shown, when the drive connection part 16 includes a universal joint 15, the far end of the drive co...
Embodiment 2
[0065] Such as Figure 4 to Figure 6 As shown, the drive connection part 16 provided in this embodiment may include a ball joint 17 or a plurality of ball joints 17 in series, the distal end of the drive connection part 16 is connected to the proximal base plate 4, and the proximal end of the drive connection part 16 passes through The proximal stop disc 7 is connected with the proximal stop disc 7, and the part of the drive connection part 16 located at the proximal side of the proximal stop disc 7 forms a free end for connecting with an external drive mechanism, and the drive connection part 16 is externally connected to the drive mechanism to drive The movement of the proximal disc 7 reverses to realize the pushing and pulling of the structural bone 12 , thereby realizing the bending of the distal continuum 3 in different directions in space.
[0066] It can be understood that the driving connection part 16 includes at least one ball joint 17 and at least one connecting rod...
Embodiment 3
[0079] Such as Figure 7 to Figure 9 As shown, the drive connection part 16 provided in this embodiment may include a hinge joint, the distal end of the drive connection part 16 is connected to the proximal base plate 4, and the proximal end of the drive connection part 16 passes through the proximal stop disc 7 and connects with the proximal end The stop disc 7 is connected, and the part of the drive connection part 16 located on the proximal side of the proximal stop disc 7 forms a free end for connecting with an external drive mechanism, and the drive connection part 16 is externally connected to the drive mechanism to drive the proximal stop disc 7 to move and overturn , to realize the pushing and pulling of the structural bone 12, thereby realizing the bending of the distal continuum 3 along different directions in space.
[0080] Specifically, the driving connection part 16 includes at least one distal connecting rod and at least one proximal connecting rod hinged to for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More