

A method and device for calculating obstacle heading angle based on time synchronization
A technology of time synchronization and heading angle, applied in two-dimensional position/channel control, transportation and packaging, vehicle position/route/altitude control, etc., can solve the problems of unguaranteed stability, difficult and difficult accuracy of results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
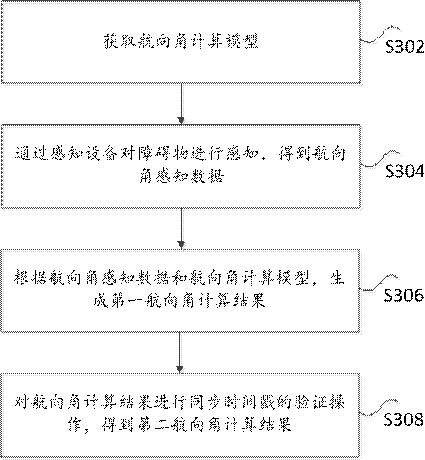
[0027] image 3 is a flow chart of a time synchronization-based obstacle heading angle calculation method according to an embodiment of the present invention, such as image 3 As shown, the method includes the following steps:
[0028] Step S302, obtaining a heading angle calculation model, wherein the heading angle calculation model is obtained through training on the heading angle yaw value historical data.
[0029] Optionally, the heading angle calculation model adopts a double-chain layer DNN network model.
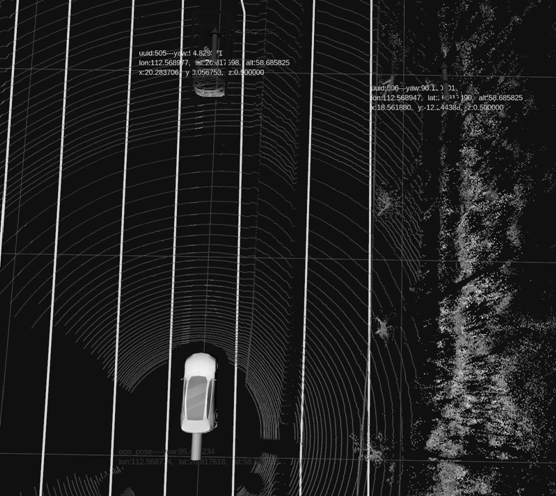
[0030] Specifically, in order to solve the perceptual detection algorithm of the prior art, it is difficult to calculate the yaw angle of obstacles using image perception, and the results are also difficult to be accurate; it is not easy to calculate the yaw angle of obstacles using traditional point cloud clustering algorithms Accuracy and stability cannot be guaranteed. Secondly, the calculation of the obstacle heading angle also involves the own vehicle heading ...
Embodiment 2
[0042] Figure 4 is a structural block diagram of a time synchronization-based obstacle course angle calculation device according to an embodiment of the present invention, such as Figure 4 As shown, the method includes the following steps:
[0043] The acquisition module 40 is configured to acquire a heading angle calculation model, wherein the heading angle calculation model is obtained through training on the course angle yaw value historical data.
[0044] Optionally, the heading angle calculation model adopts a double-chain layer DNN network model.
[0045] Specifically, in order to solve the perceptual detection algorithm of the prior art, it is difficult to calculate the yaw angle of obstacles using image perception, and the results are also difficult to be accurate; it is not easy to calculate the yaw angle of obstacles using traditional point cloud clustering algorithms Accuracy and stability cannot be guaranteed. Secondly, the calculation of the obstacle heading ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More