

Decision planning method for automatic driving, electronic equipment and computer storage medium
A technology for autonomous driving and planning, applied in computing, neural learning methods, biological neural network models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
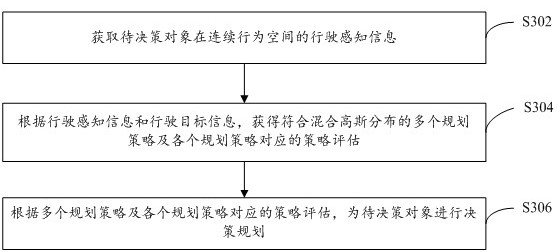
[0028] refer to Figure 3A , shows a flow chart of steps of a decision planning method for automatic driving according to Embodiment 1 of the present application.
[0029] The decision planning method for automatic driving in this embodiment includes the following steps:
[0030] Step S302: Obtain the driving perception information of the object to be decided in the continuous behavior space.
[0031] The object to be decided can be a device that carries an intelligent device (such as a processor or a chip, etc.), and can perform corresponding operations according to the instructions of the intelligent device, such as executing the instruction operation corresponding to the decision-making plan; it can also be a device that can upload corresponding information to A remote intelligent device (such as a server), and a device that can accept instructions from the intelligent device and perform corresponding operations. In the embodiment of the present application, the forms tha...
Embodiment 2
[0052] refer to Figure 4A , shows a flow chart of steps of a decision planning method for automatic driving according to Embodiment 2 of the present application.
[0053] In this embodiment, the training of the combination of the reinforcement learning network model and MCTS is emphasized. The training completed reinforcement learning network model can be applied to the decision-making planning scheme of automatic driving in the foregoing embodiment, so as to make effective decisions on the decision-making objects. planning.
[0054] The decision planning method for automatic driving in this embodiment includes the following steps:
[0055] Step S402: Train the policy value model in the reinforcement learning network model.
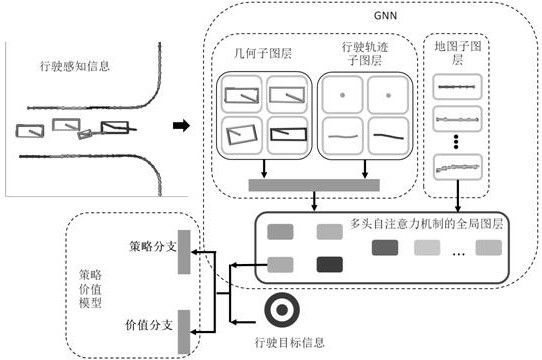
[0056] like figure 2 As shown in , the reinforcement learning network model in the embodiment of the present application includes a GNN model part and a strategy value model part, wherein the GNN part can be a pre-trained model. Therefore, in this embo...
Embodiment 3
[0104] refer to Figure 5 , shows a structural block diagram of an automatic driving decision planning device according to Embodiment 3 of the present application.
[0105] The decision planning device for automatic driving in this embodiment includes: a first acquisition module 502, configured to acquire driving perception information of an object to be decided in a continuous behavior space, wherein the driving perception information includes: information related to the object to be decided Geometric information, historical driving track information and map information; the second acquisition module 504 is used to obtain multiple planning strategies conforming to the mixed Gaussian distribution and strategy evaluation corresponding to each planning strategy according to the driving perception information and driving target information; planning Module 506, configured to perform decision planning for the object to be decided according to the multiple planning strategies and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More