Power transmission cable inspection robot pressing device and pressing method thereof
A technology of inspection robot and pressing device, which is applied in the field of line inspection robot, can solve problems such as damage, friction damage of traveling mechanism and power transmission cable, and increase the working intensity of maintenance personnel, so as to improve service life, improve pressing walking, Avoid friction and shaking to damage the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
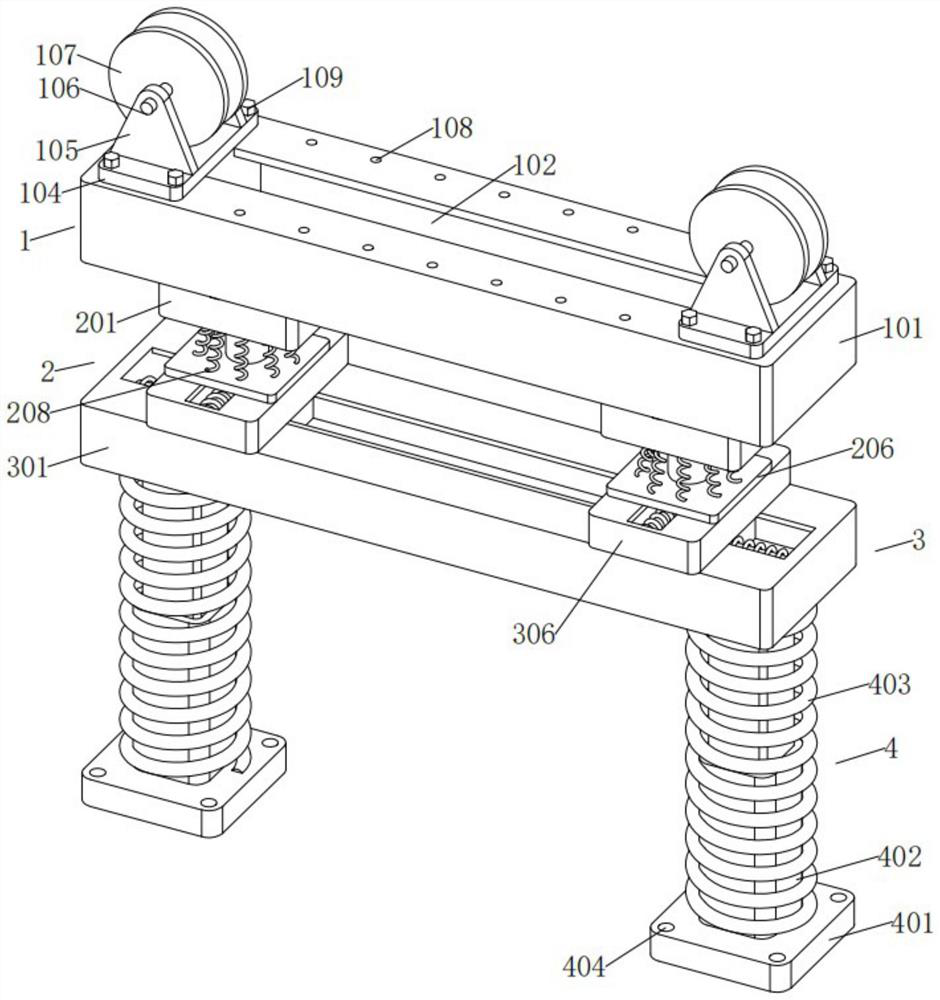
[0055] Such as Figure 1-Figure 8 As shown, the invention discloses a pressing device and a pressing method of a power transmission cable inspection robot. Wherein, a pressing device of a power transmission cable inspection robot includes a pressing wheel part 1 , at least one set of multi-directional shaking damping parts 2 and a pair of vertical shock absorbing parts 4 .
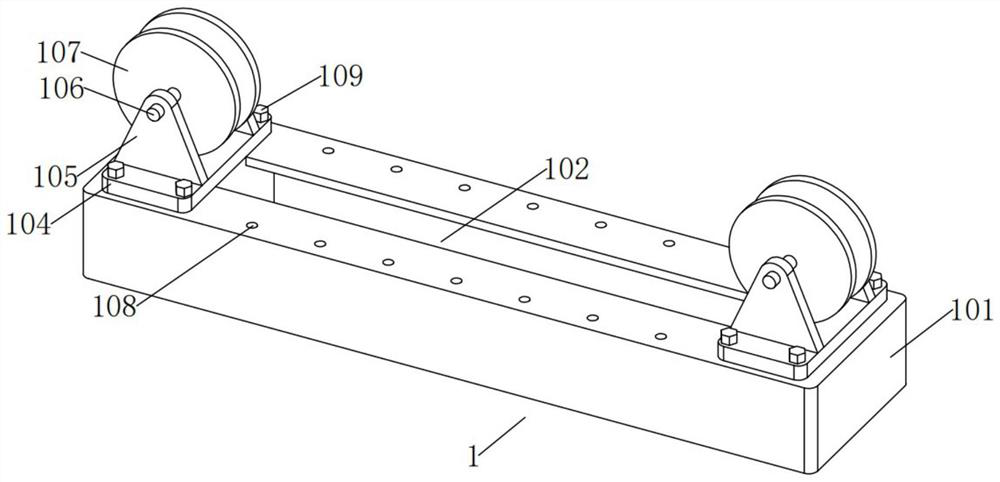
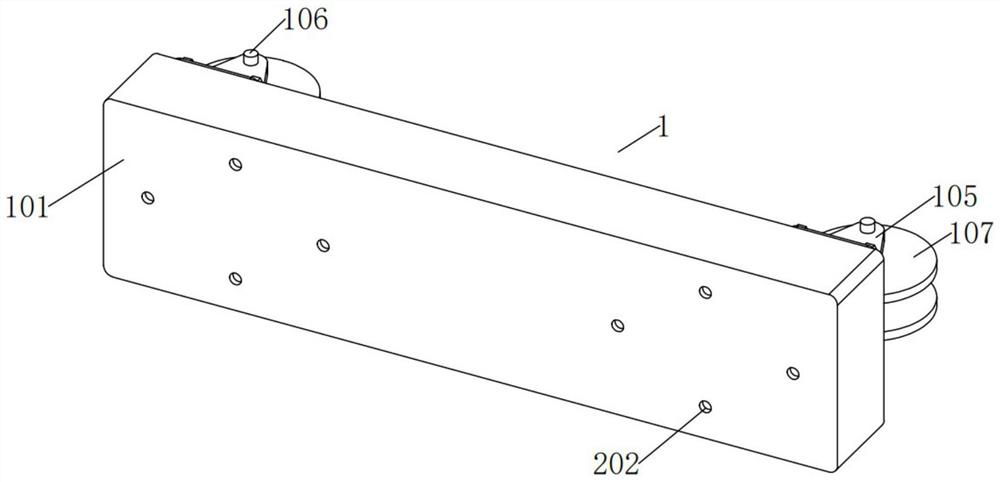
[0056] Such as Figure 1-Figure 4 As shown, the pressing wheel part 1 is used to cooperate with the traveling wheels in the traveling mechanism of the power transmission cable inspection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More