Self-adaptive new multi-extended target tracking method
A multi-extended target and extended target technology, which is applied in the field of self-adaptive new multi-extended target tracking, can solve the problem of poor multi-extended target tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings, wherein the same or similar reference numerals refer to the same or similar elements or elements having the same or similar functions throughout. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to explain the present invention and should not be construed as limiting the present invention.
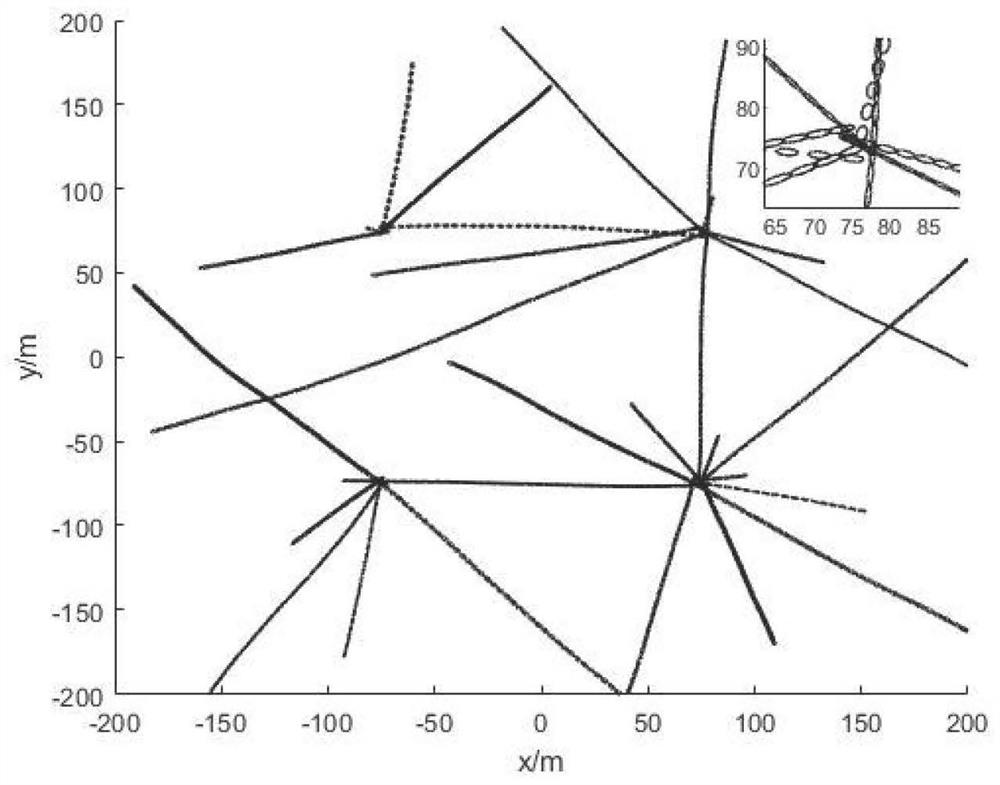
[0029] In this application document, the following terms are used: 'std' means standard Poisson-Do Bernoulli mixing filtering based on fixed nascent distribution, 'tb' means filtering based on adaptive nascent distribution, 'gbs' means Gibb Sampling, 'BGGIW' means filtering based on unknown detection probability, 'ture value' means actual but unknown detection probability, 'PHD' means probability hypothesis density filtering.
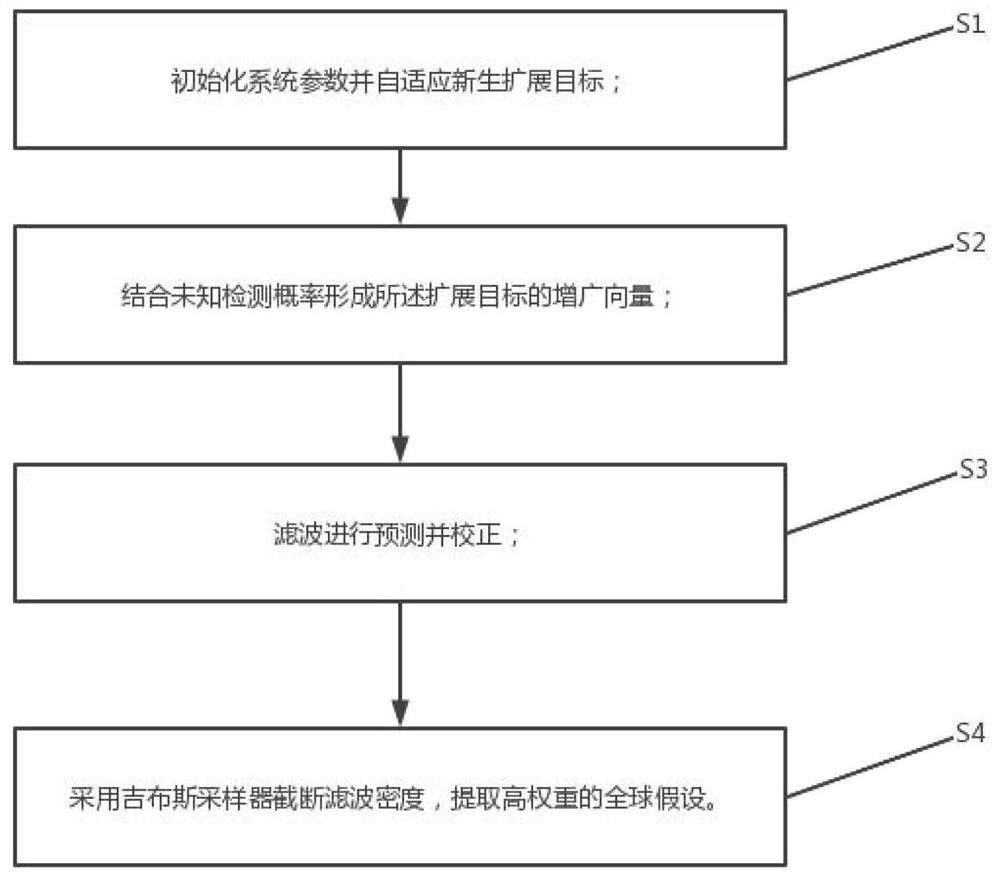
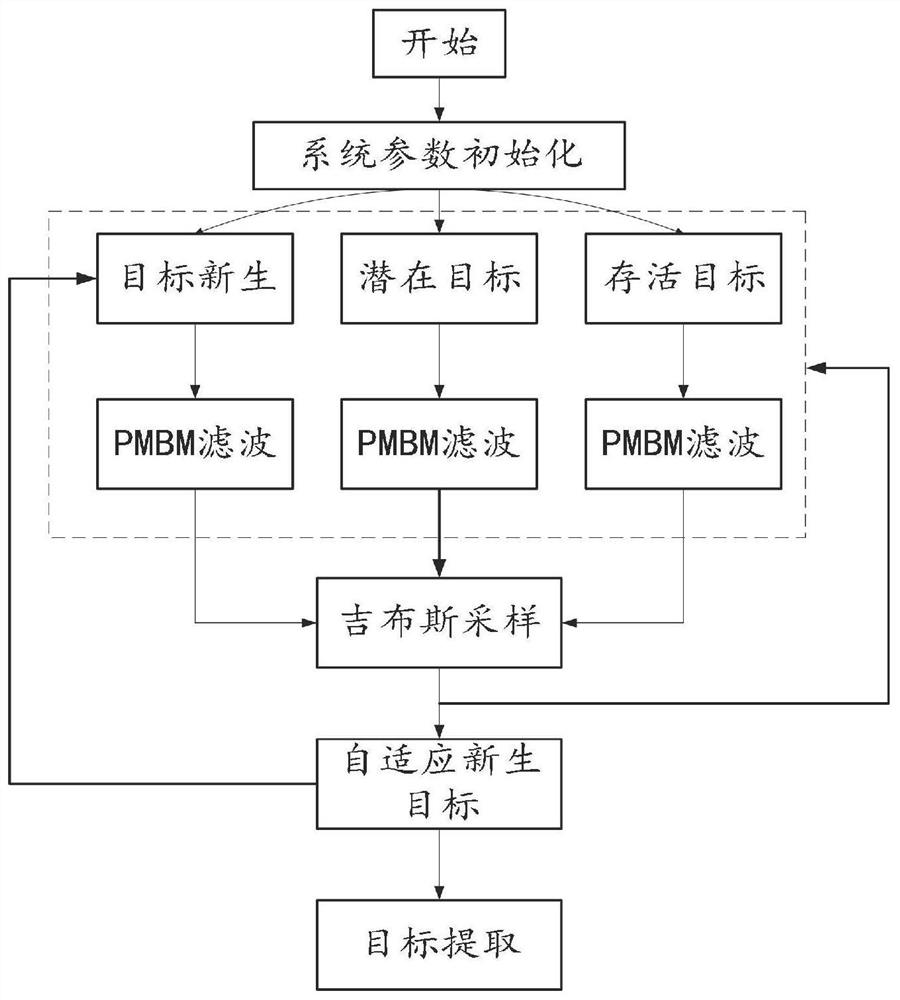
[0030] see figure 1 , the present invention proposes an ada...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More