

Man-machine co-driving control method based on non-cooperative game and related device
A non-cooperative game and control method technology, applied in the field of intelligent vehicles, can solve the problems of excessive driver intervention and lack of theoretical support, and achieve the effect of achieving smooth handover, reducing human-machine conflicts, and improving driving comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
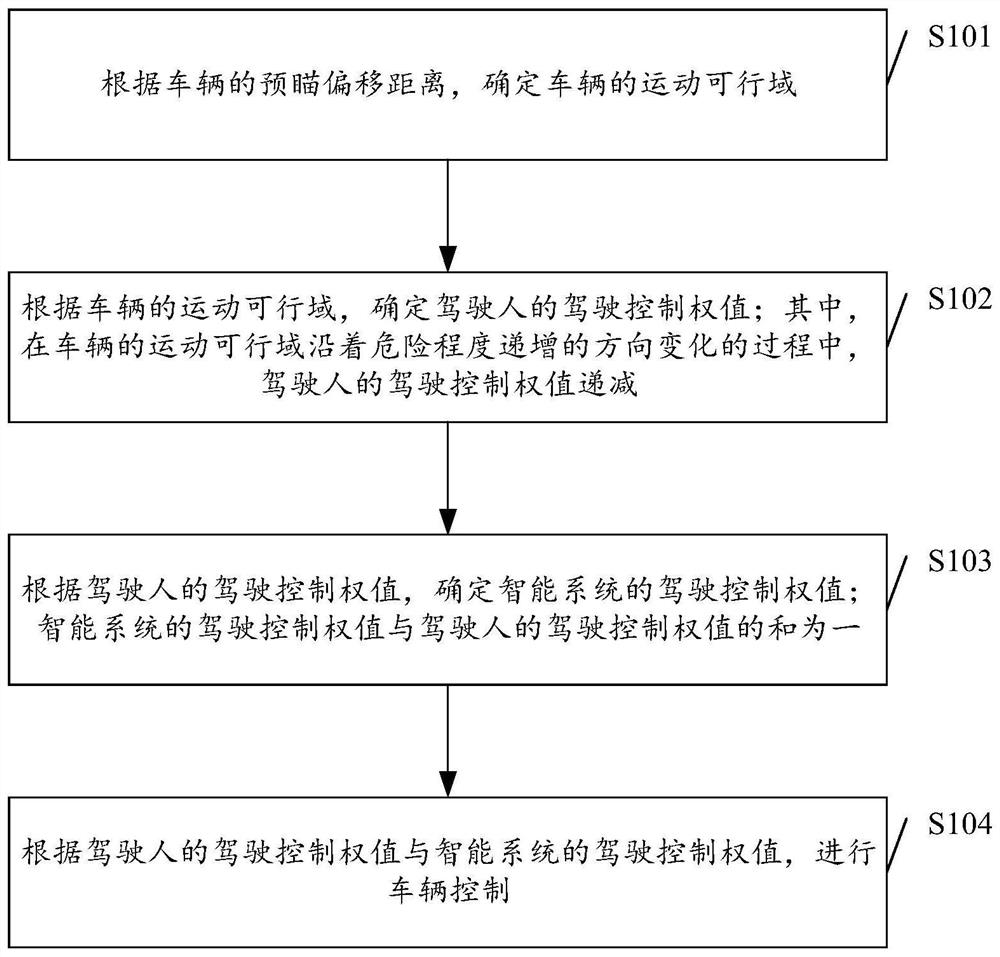
[0039] The core of this application is to provide a non-cooperative game-based human-machine co-driving control method, which can reduce human-machine conflicts in the process of man-machine co-driving, and realize the smooth handover of driving control weights between the driver and the intelligent system. Another core of the present application is to provide a non-cooperative game-based human-machine co-driving control device, equipment, and computer-readable storage medium, all of which have the above-mentioned technical effects.
[0040] In order to make the purposes, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. Obviously, the described embodiments It is a part of the embodiments of this application, not all of them. Based on the embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More