

Prediction method and system for deep average flow of underwater glider
An underwater glider and prediction method technology, applied in the field of ocean observation, can solve problems such as low temporal and spatial resolution, reduced prediction accuracy, and sensitivity to convection, and achieve the effects of reducing the number of sequences, improving recognition, and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
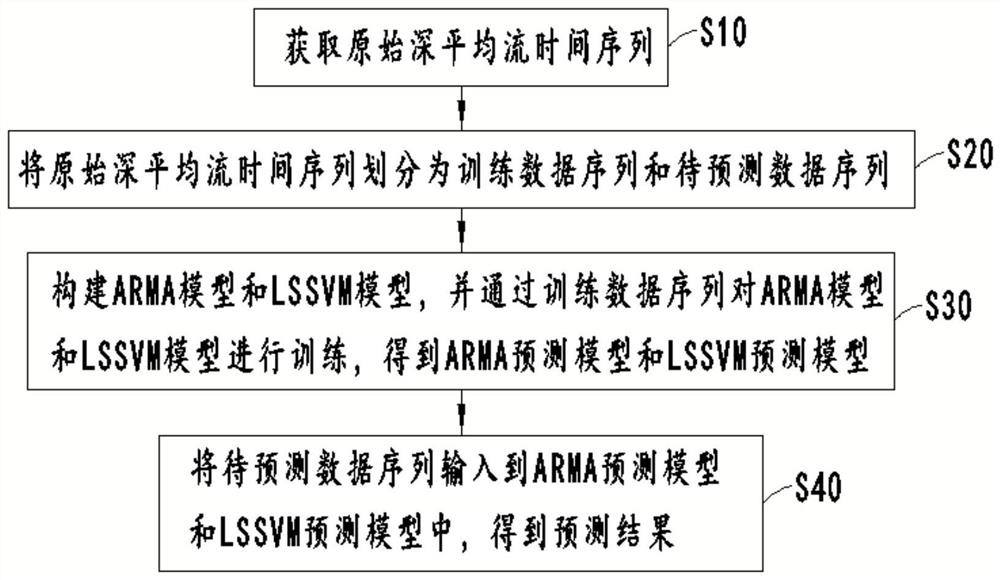
[0064] Such as figure 1 Shown, a kind of prediction method of underwater glider deep average current is characterized in that: comprise the following steps:
[0065] S10, obtaining the original deep mean flow time series;
[0066] S20, dividing the original deep average flow time series into a training data series and a data series to be predicted;
[0067] S30, construct the ARMA model and the LSSVM model, and train the ARMA model and the LSSVM model through the training data sequence, and obtain the ARMA prediction model and the LSSVM prediction model;
[0068] S40, inputting the data sequence to be predicted into the ARMA prediction model and the LSSVM prediction model to obtain a prediction result;
[0069] Among them, the original deep mean current time series is the historical data in the driving profile period of the underwater glider, and only includes the magnitude, not the direction.
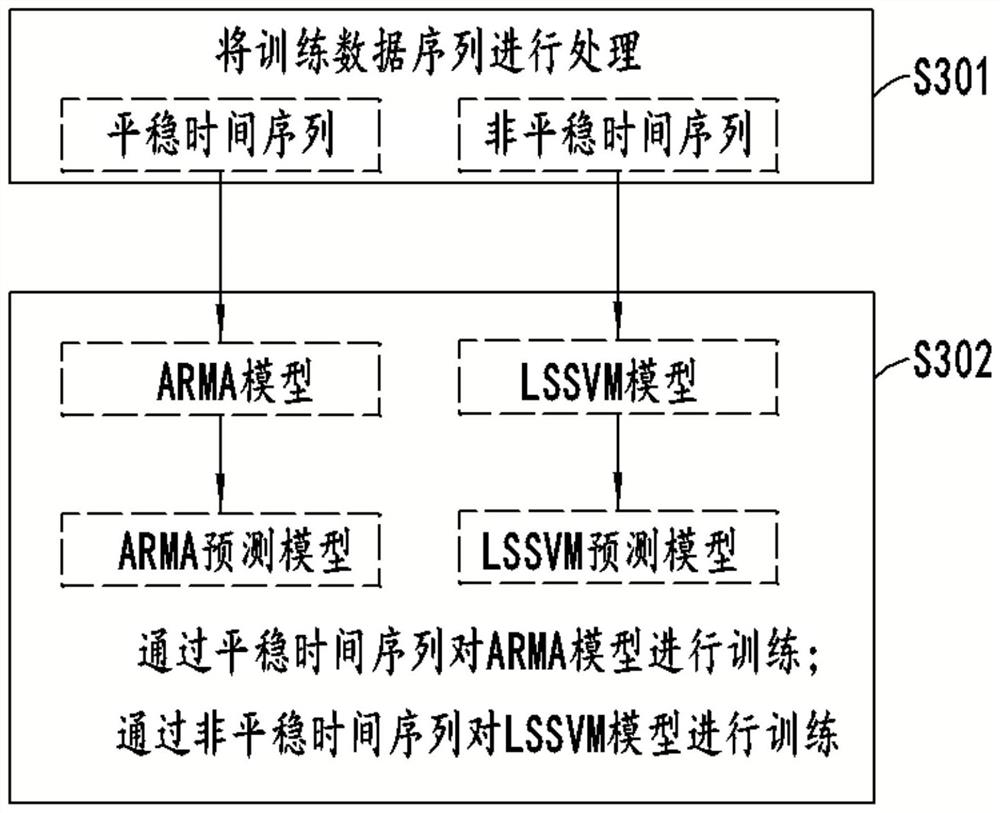
[0070] Such as figure 2 As shown, in this embodiment, the step S30 is to cons...
Embodiment 2
[0092] Such as Figure 4 As shown, on the basis of Embodiment 1, the step S40 is to input the data sequence to be predicted into the ARMA prediction model and the LSSVM prediction model to obtain the prediction results, which specifically include:
[0093] S401, processing the data to be predicted to obtain a stable time series to be predicted and / or a non-stationary time series to be predicted;
[0094] S402. When the data to be predicted is a stable time series to be predicted, perform prediction through the ARMA prediction model to obtain a final prediction result;
[0095] S403. When the data to be predicted is a non-stationary time series to be predicted, perform prediction through the LSSVM prediction model to obtain a final prediction result;
[0096] S404. When the data to be predicted includes both the stable time series to be predicted and the non-stationary time series to be predicted, the ARMA prediction model is used to predict the stable time series to be predic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More