

Tractor paddy field operation path tracking method and system based on variable universe fuzzy PID theory
A technology of path tracking and variable universe, which is applied in the field of intelligent control of agricultural machinery, can solve problems such as difficulty in establishing mathematical models, large tilt of the vehicle body, and restrictions, and achieve smooth path tracking on-line process, improve control accuracy and robustness, and ensure accuracy Effects on sex and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below with reference to the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
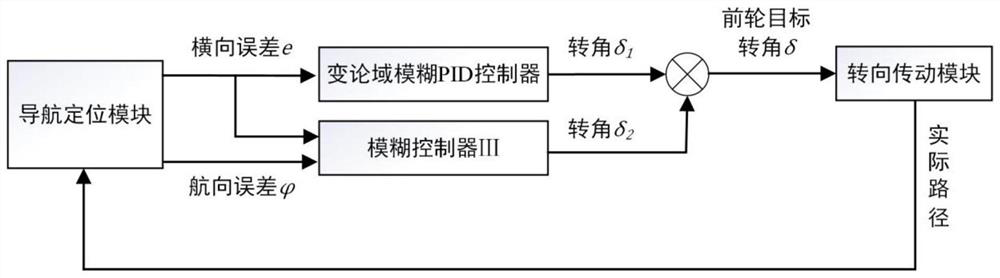
[0030] A tractor paddy field operation path tracking method based on variable universe fuzzy PID theory of the present invention is based on figure 1 The shown control system performs path tracking, and the control system includes a navigation and positioning module, a variable universe fuzzy PID controller, a fuzzy controller III and a steering transmission module. The navigation and positioning module will update the current path of the tractor and the reference path. Lateral and heading errors Send to the fuzzy controller III, and send the updated lateral error e between the current path and the reference path of the tractor to the variable universe fuzzy PID controller, and the variable universe fuzzy PID controller outputs the front wheel target angle δ 1 , the fuzzy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More