Automatic driving test scene analysis method and system
A technology for testing scenarios and automatic driving, which is applied in the fields of scene recognition, instrument, character and pattern recognition, etc. It can solve the problems of low efficiency, inability to quantify the difficulty of scene analysis, time-consuming and labor-intensive, etc., and achieve flexibility Strong, reduce redundant scene fragments, and avoid the effect of judging differences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the content of the present invention more clearly understood, the present invention will be further described in detail below based on the specific embodiments and in conjunction with the accompanying drawings.
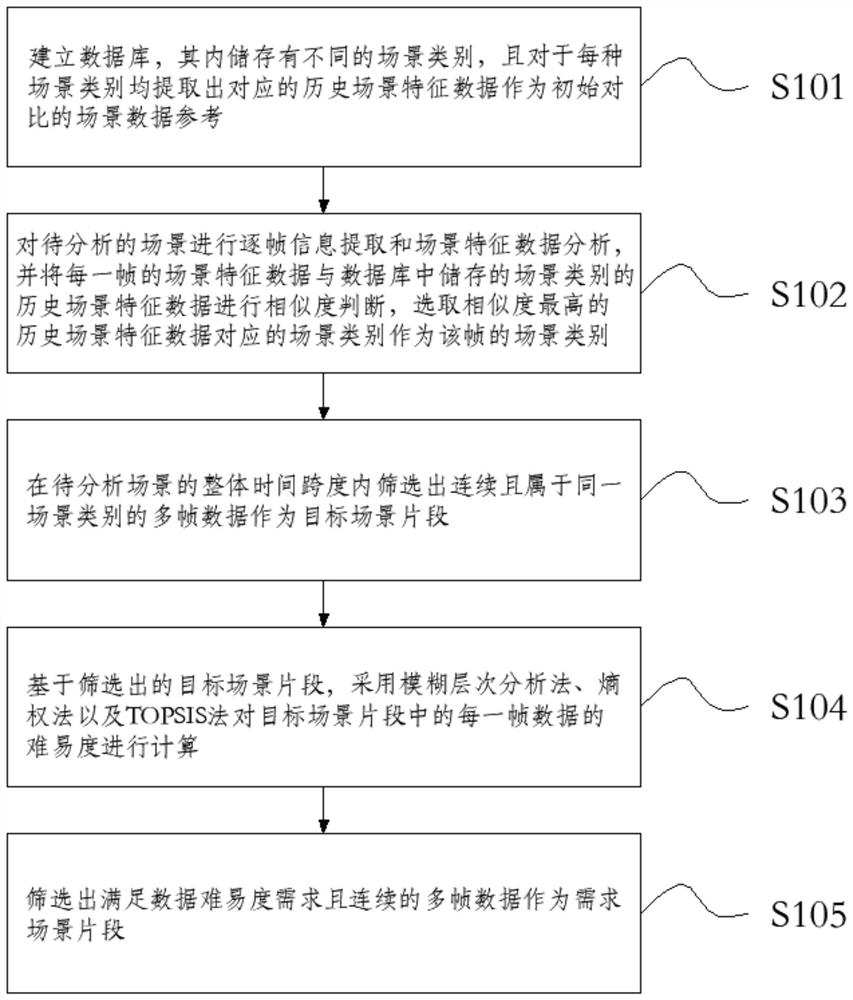
[0031] This embodiment provides an automatic driving test scene analysis method, including steps S101 to S105, and the specific steps are described as follows:
[0032] Step S101: Establish a database, which stores several different historical scene categories, and extracts corresponding historical scene feature data for each historical scene category as a scene data reference for initial comparison.
[0033] Specifically, historical data is stored in the database, and the historical data includes N scene categories and corresponding historical scene feature data. Specifically, the first scene category, the second scene category ... the Nth scene category, the historical first scene feature data corresponding to the first scene category, the hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More