Path width determination method, robot and computer readable storage medium
A path width and determination method technology, applied in the field of robotics, can solve problems such as reducing robot efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
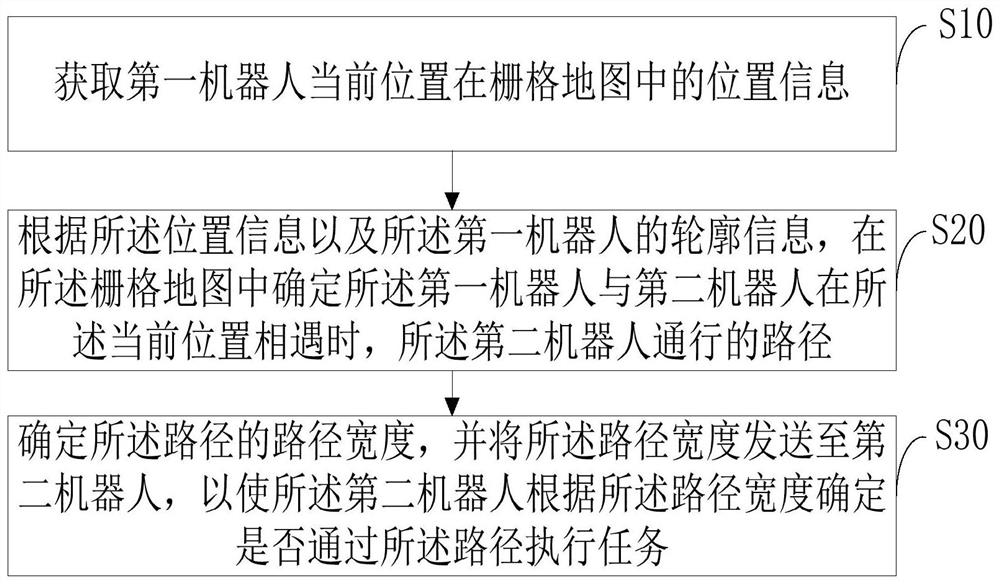
[0044] The main solution of the embodiment of the present application is to obtain the position information of the current position of the first robot in the grid map; according to the position information and the outline information of the first robot, determine the When the first robot and the second robot meet at the current position, the path that the second robot passes through; determine the path width of the path, and send the path width to the second robot, so that the second robot The robot determines whether to perform a task through the path according to the path width.
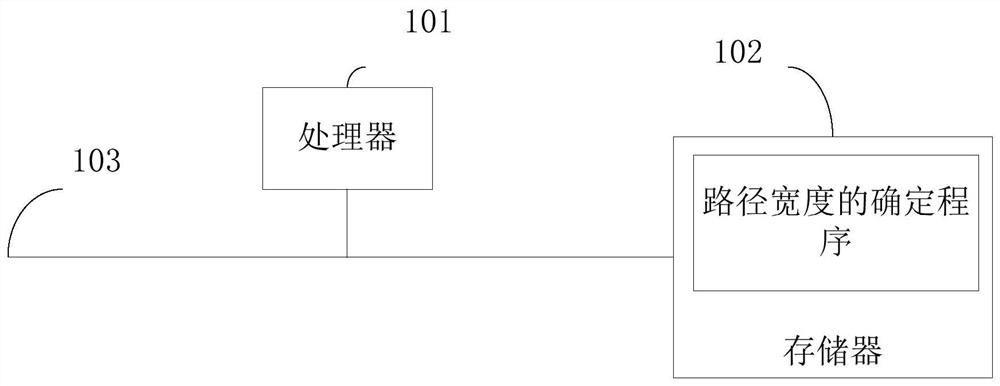
[0045] As an implementation, refer to figure 1 , figure 1 is a schematic diagram of the hardware architecture of the robot involved in the solution of the embodiment of the present application, such as figure 1 As s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com