

Method and system for self-driving vehicles traveling in groups
An automatic driving and vehicle technology, which is applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc. It can solve the problems of not disclosing the specific method of driving control, so as to avoid misunderstanding and avoid getting lost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
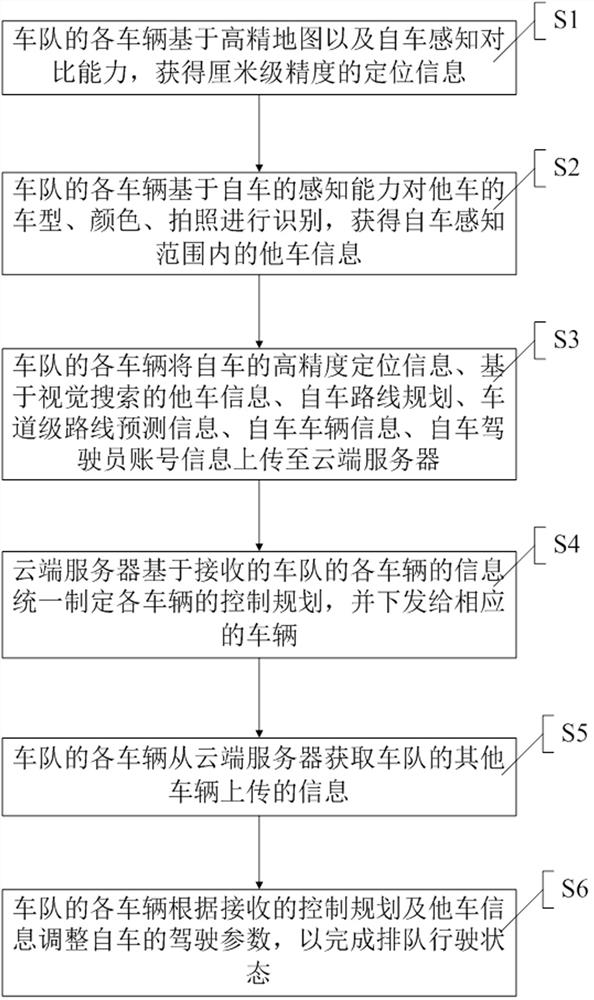
[0054] Such as figure 1 and figure 2 As shown, a method for self-driving vehicles to travel in groups, including:
[0055] S1: Each vehicle in the fleet obtains centimeter-level precision positioning information based on high-precision maps and self-vehicle perception comparison capabilities;
[0056] S2: Each vehicle in the fleet recognizes the model, color, and photo of other cars based on the perception ability of the own car, and obtains the information of other cars within the range of perception of the own car;
[0057] S3: Each vehicle in the fleet uploads its own vehicle's high-precision positioning information, other vehicle information based on visual search, its own vehicle's route planning, control planning information, its own vehicle information, and its own driver's account information to the cloud server;
[0058] S4: The cloud server uniformly formulates the control plan of each vehicle based on the received information of each vehicle in the fleet, and iss...
Embodiment 2
[0071] The difference from the previous embodiment is that in this embodiment, the method further includes that each vehicle of the fleet uploads the high-precision positioning information of the own vehicle to the information layer of the high-precision map of the cloud server, and the cloud server uses This obtains the relative positional relationship between the vehicles of the fleet at the lane level and at the centimeter level. The cloud server uniformly formulates a control plan for each vehicle according to the relative positional relationship among the vehicles of the fleet.
Embodiment 3
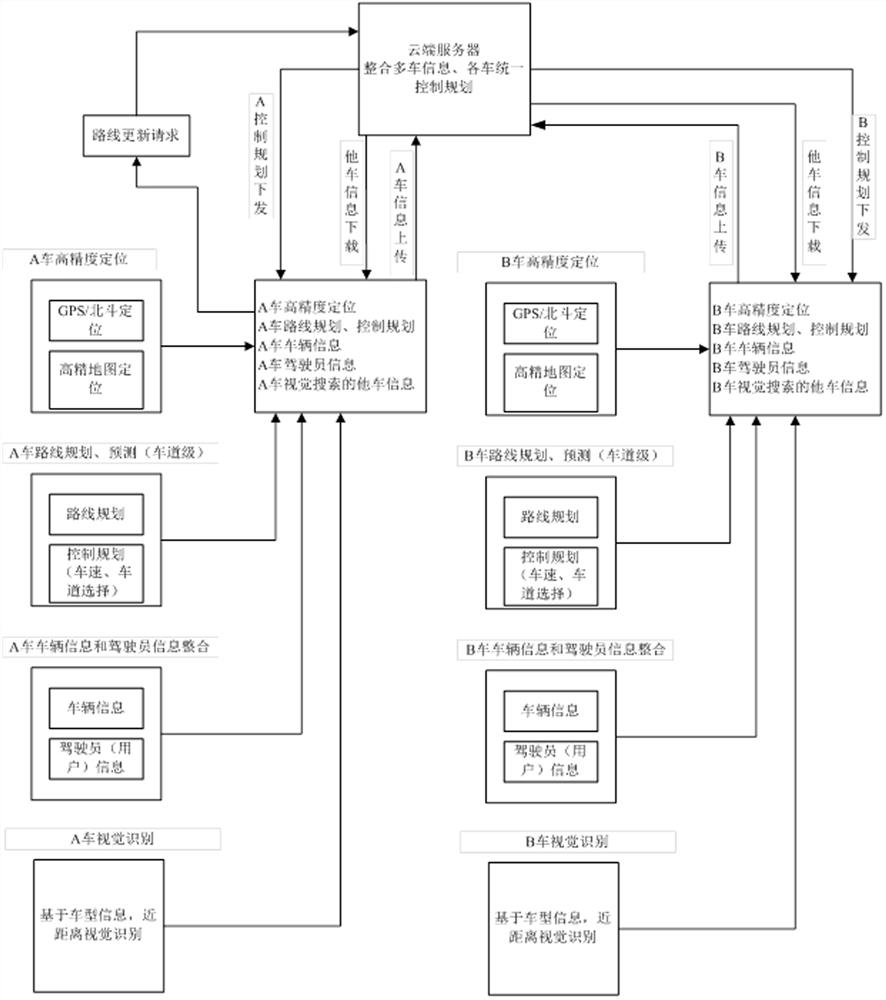
[0073] A self-driving vehicle team travel system, including a cloud server, the cloud server cooperates with at least two vehicle controllers to execute the self-driving vehicle team travel method, and the cloud server is used for:
[0074] Receive the high-precision positioning information of the own vehicle uploaded by each vehicle in the fleet, the information of other vehicles based on visual search, the route planning of the own vehicle, the control planning information, the information of the own vehicle, and the account information of the driver of the own vehicle;
[0075] Based on the received information of each vehicle in the fleet, the control plan of each vehicle is uniformly formulated and issued to the corresponding vehicle;
[0076] Send the information of each vehicle in the accepted fleet to other vehicles in the fleet except the own vehicle.
[0077] In this embodiment, preferably, the cloud server is also used to receive the route update request information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More