
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Aircraft two-axis tracking pan-tilt decoupling control method, system and storage medium
A two-axis tracking and decoupling control technology, which is applied in the field of aircraft control, can solve the problems of being unable to lock the target, and achieve the effects of improving the tracking effect, improving the stabilization of the gimbal, and reducing the shaking of the azimuth axis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] The applicant found that when using an aircraft to perform shooting and tracking, the two-axis gimbal installed on the aircraft shakes in the azimuth direction due to roll disturbance due to lack of axis, and the image cannot be recognized due to the shaking of the azimuth axis and the shaking of the roll axis. The effect of tracking the target is very poor, which affects the execution of the tracking task.
[0042] To this end, the embodiment of the present application provides a method for decoupling control of the two-axis tracking gimbal of an aircraft, see figure 1 , applied to the server side, including the following steps:
[0043] Step S1, obtaining the data group of the pan-tilt through the sensor installed on the pan-tilt;
[0044] It should be emphasized that the gimbal in the embodiment of the present application is a gimbal with azimuth and pitch two-axis image stabilization axes.
[0045] Usually, the data set mainly includes:
[0046] The angular veloc...
Embodiment 2
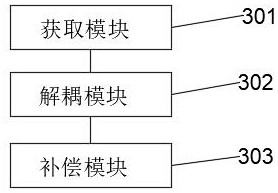
[0089] The embodiment of the present application provides an aircraft two-axis tracking gimbal decoupling control device, refer to figure 2 , the device consists of:
[0090] Obtaining module 301, is used for obtaining the data group of PTZ; Also used for;
[0091] Among them, the data group of the PTZ includes:
[0092] The angular velocity of the gimbal camera in the pitch direction is GyroX, and the angular velocity of the gimbal camera in the azimuth direction is GyroZ;
[0093] Gimbal pitch angle α;
[0094] The angular velocity of the gimbal pitch motor shaft is GyroMotorX, and the angular velocity of the gimbal azimuth motor shaft is GyroMotorZ.
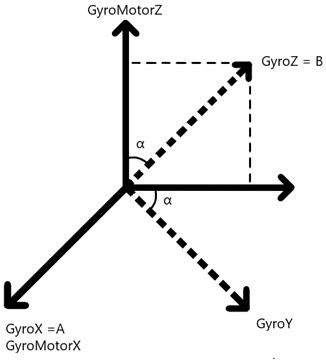
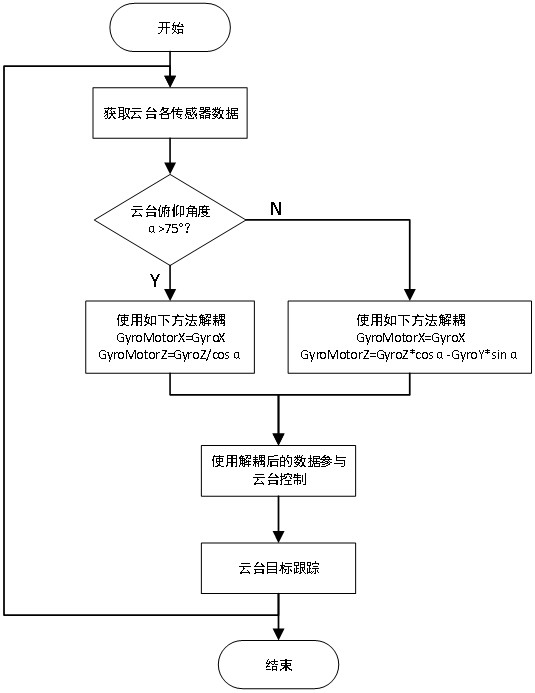
[0095] The decoupling module 302 is used for decoupling the angular velocity between the gimbal camera shaft and the gimbal motor shaft based on the data set; it is also used for:
[0096] The angular velocity decoupling includes the following steps:
[0097] According to the size of the pitch angle α of the platform, th...
Embodiment 3
[0108] Embodiment 3 of the present application also provides a storage medium on which computer instructions are stored, and when the computer instructions are executed by a processor, the following steps are implemented:
[0109] Step S31, obtaining the data group of the pan-tilt through the sensor installed on the pan-tilt;
[0110] It should be emphasized that the gimbal in the embodiment of the present application is a gimbal with azimuth and pitch two-axis image stabilization axes.
[0111] Usually, the data set mainly includes:
[0112] The angular velocity of the gimbal camera in the pitch direction GyroX, the angular velocity of the gimbal camera in the roll direction GyroY, the angular velocity of the gimbal camera in the azimuth direction GyroZ;
[0113] Gimbal pitch angle α, gimbal roll angle β, multi-rotor aircraft flight attitude roll angle γ;
[0114] Gimbal pitch motor shaft angular speed GyroMotorX, gimbal roll motor shaft angular speed GyroMotorY, gimbal azi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com