

Motion path planning method, device, equipment, medium and robotic arm of robotic arm
A technology of motion paths and robotic arms, applied in the field of robotic arms, can solve problems such as overflow and path points that cannot meet job requirements, and achieve the effect of expanding application scenarios
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The following describes in detail the embodiments of the present invention, examples of which are illustrated in the accompanying drawings, wherein the same or similar reference numerals refer to the same or similar elements or elements having the same or similar functions throughout. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to be used to explain the present invention, but should not be construed as a limitation of the present invention. Based on the embodiments of the present invention, those of ordinary skill in the art will not make any creative work on the premise. All other embodiments obtained below belong to the protection scope of the present invention.
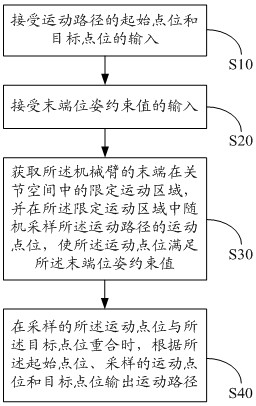
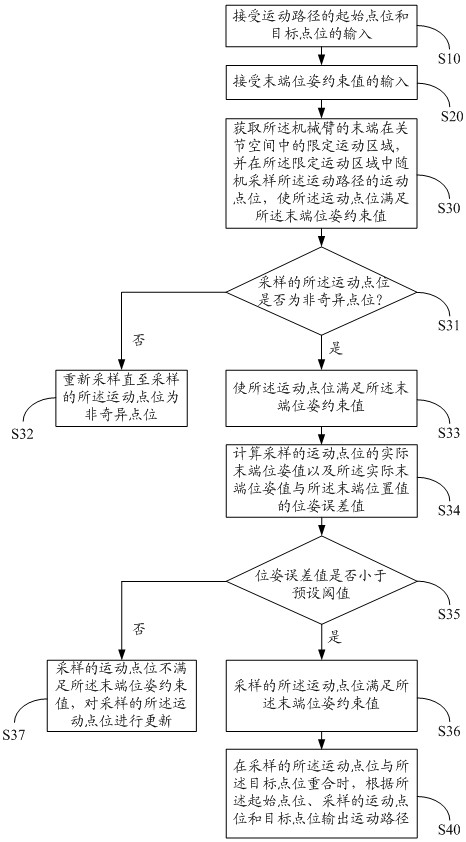
[0064] The present invention proposes a motion path planning method for a robotic arm, refer to figure 1 and figure 2 , the motion path planning method of the manipulator includes:
[0065] Step S10: accept the input of the starting point and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More