Accommodating type fruit grabbing manipulator and method
A grasping manipulator, a permissive technology, applied in the field of permissive fruit grasping manipulators, can solve problems such as difficulty in adapting to fruit clamping, achieve the effects of avoiding damage to the fruit surface, wide application range, and reducing development and maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
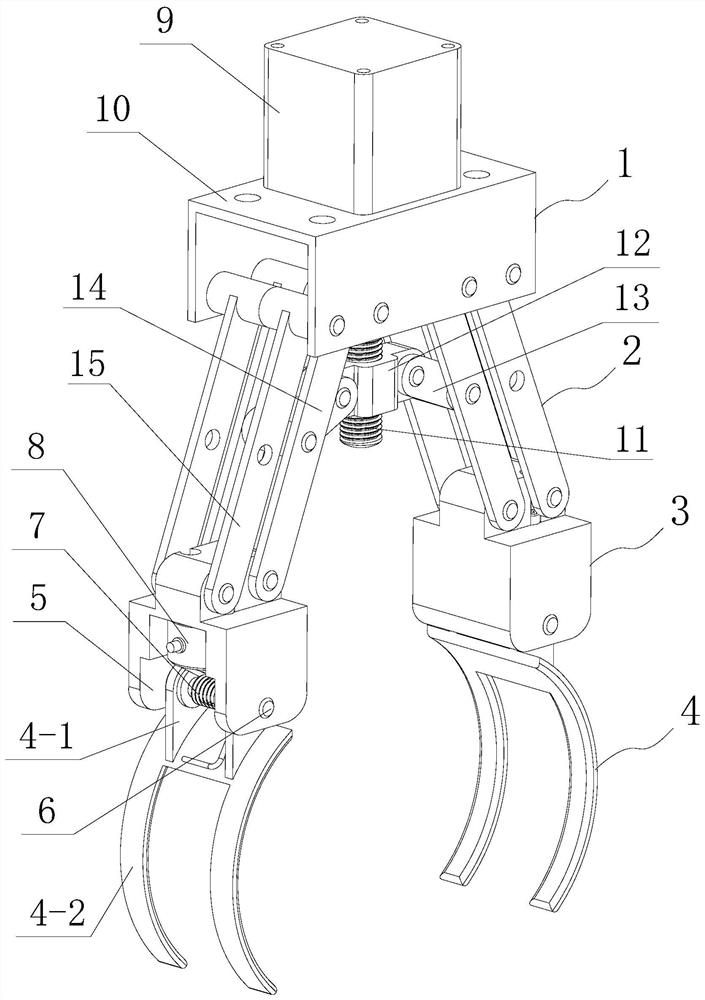
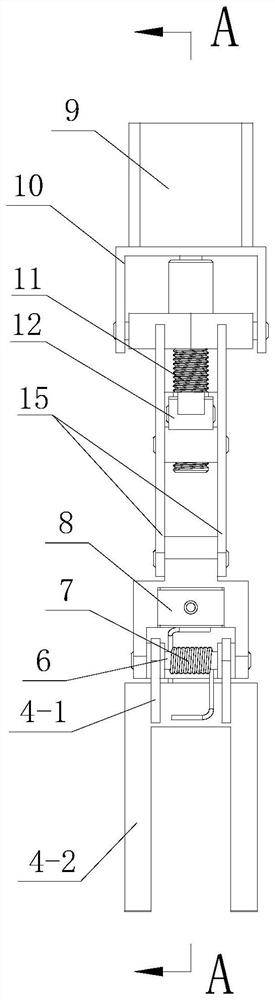
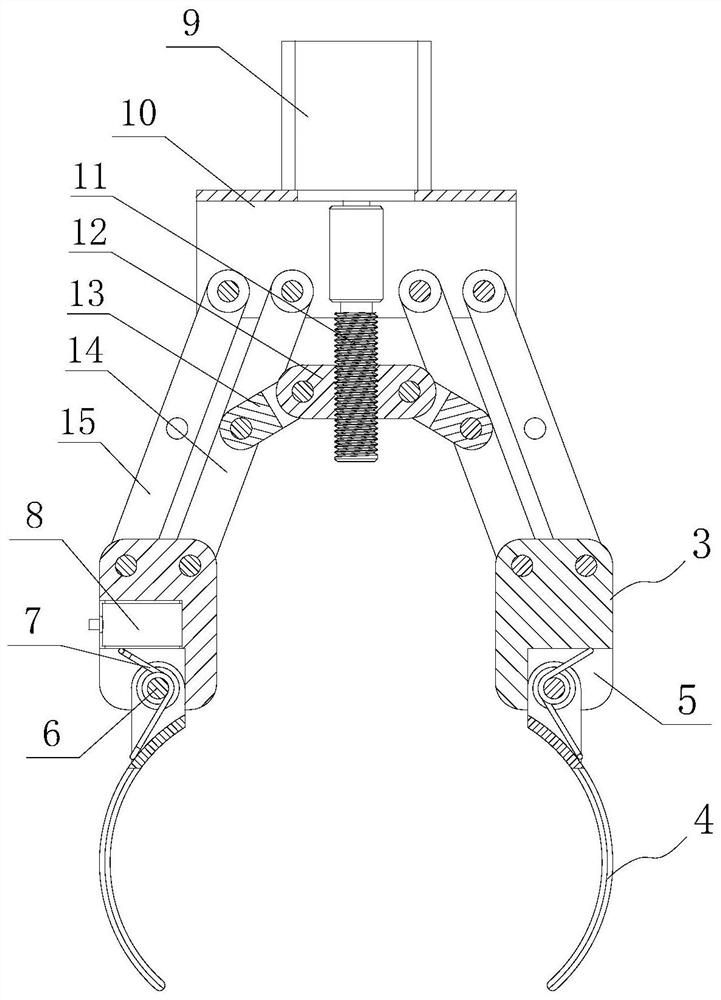
[0031] A kind of allowable fruit grasping manipulator of this embodiment, such as Figure 1 to Figure 3 As shown, it mainly includes a power drive mechanism 1 , two groups of swing bar mechanisms 2 , two claw seats 3 and two jaws 4 . The specific structure of each component is as follows:
[0032] The jaws are arc-shaped curved jaws with a rigid structure, which are installed symmetrically in pairs; the jaws include a connected installation part 4-1 and a grasping part 4-2, the grasping part is located under the installation part, and the installation part is connected to the claw seat , the grasping part is an arc-shaped frame structure (according to the actual demand for grasping fruit, the grasping part can also adopt an arc-shaped plate structure). The upper end of the jaw is provided with a pin hole, and the bottom of the claw seat is provided with a groove 5, and the pin hole of the jaw is installed in the groove of the claw seat through a hinge shaft 6. There is also ...
Embodiment 2
[0043] This embodiment is a tolerant fruit grabbing manipulator. Compared with Embodiment 1, the difference lies in that a flexible pad is provided inside the grabbing part. Through the setting of the flexible spacer, it can further play a buffering role, and avoid damage to the surface of the fruit when the jaws grab the fruit.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com