

Lane validity prediction method and prediction system based on multi-dimensional features
A prediction method and effective technology, applied in the direction of road vehicle traffic control system, prediction, traffic control system, etc., can solve the problem of ignoring the connectivity of the road network, and achieve the effect of improving accuracy and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
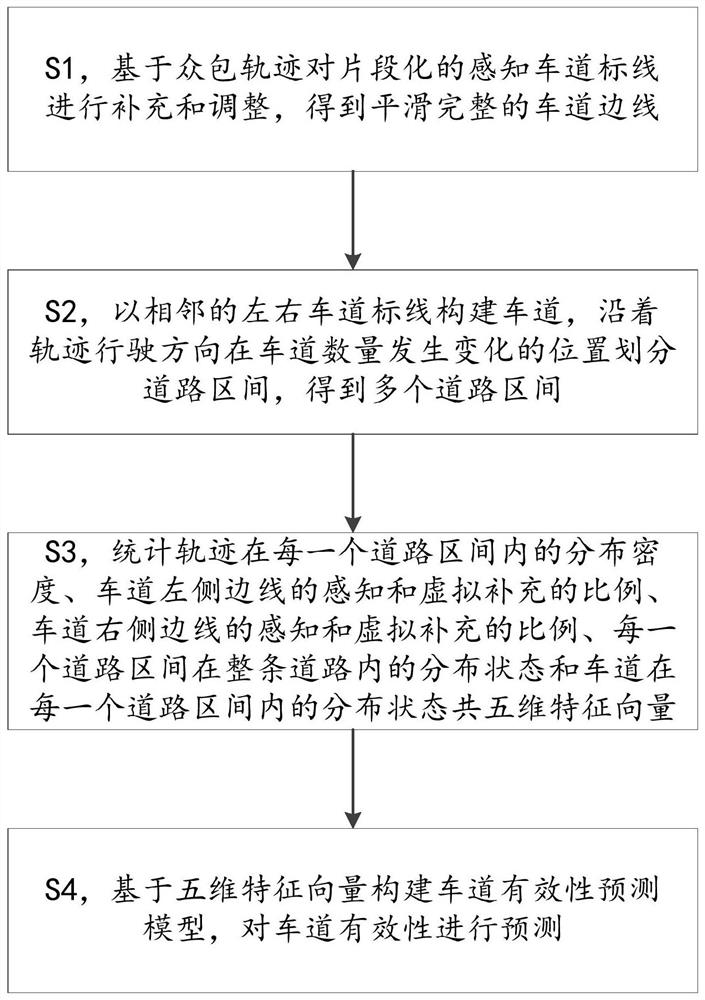
[0025] see figure 1 , provides a lane availability prediction method based on multi-dimensional features, which mainly includes the following steps:
[0026] S1, supplement and adjust the fragmented perceived lane markings based on crowdsourcing trajectories, and obtain smooth and complete lane edges.
[0027] As an embodiment, supplementing and adjusting the perceived fragmented lane markings based on the crowdsourced trajectory to obtain a smooth and complete lane edge includes: following the direction of trajectory, the fragmented perceived lane markings are Classify the horizontal distribution on the road, and stitch the perceived lane markings belonging to the same lane edge; for the missing area in the middle, refer to the nearby crowdsourcing trajectory to complete it, and get the complete lane edge.
[0028] Among them, the ground markings collected by the crowdsourcing collection vehicle are fragmented due to occlusion or wear and other reasons, and the perceived lan...
Embodiment 2
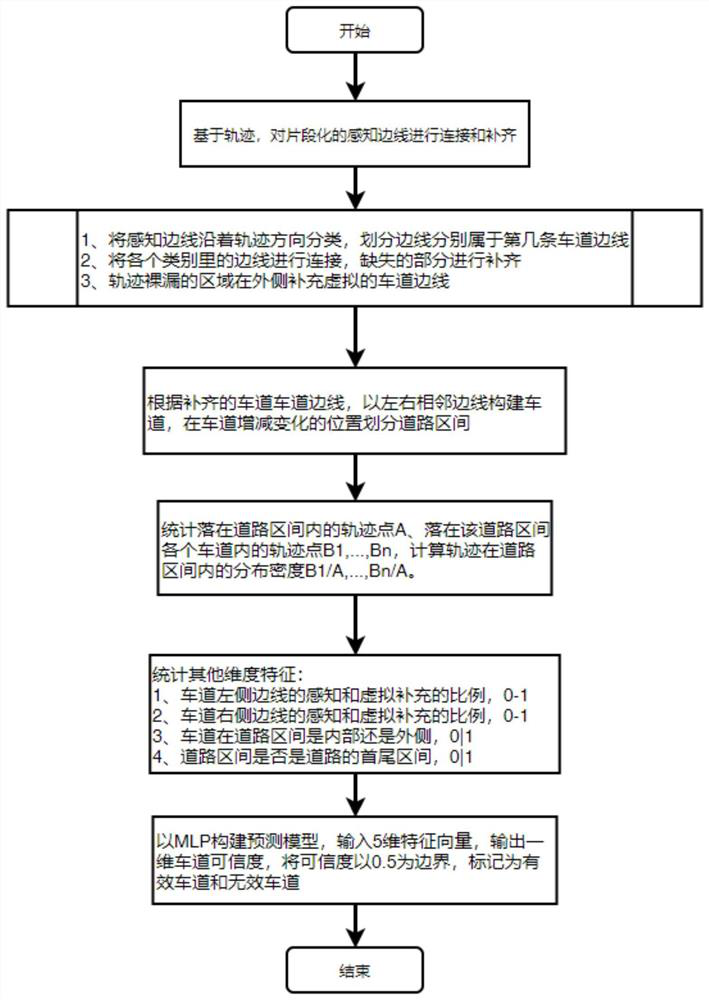
[0040] A lane effectiveness prediction method based on multi-dimensional features, see figure 2 , the prediction method mainly includes the following steps: supplement and adjust the fragmented perceived lane markings based on the crowdsourcing trajectory to obtain a smooth and complete lane edge; construct a lane with adjacent left and right lane markings, and drive along the trajectory in the The location where the number of lanes changes divides the road section, and multiple road sections are obtained; the distribution density of crowdsourcing trajectories in each road section, the ratio of perception and virtual supplement of the left side of the lane, and the perception and virtual complement of the right side of the lane are calculated. The supplementary proportion, the distribution state of each road section in the whole road, and the distribution state of lanes in each road section have a total of five-dimensional feature vectors; based on the five-dimensional feature...
Embodiment 3
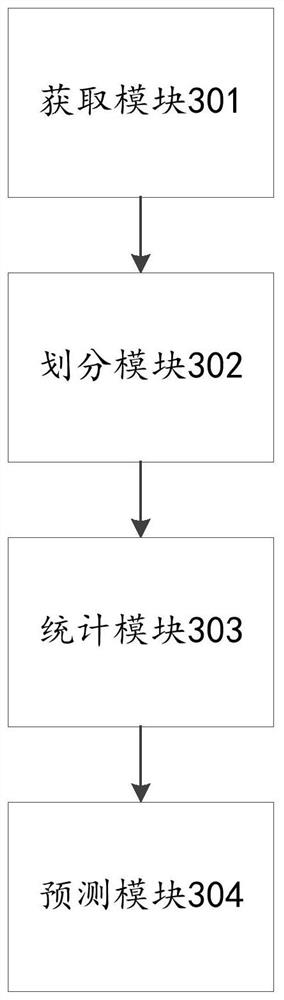
[0043] A lane availability prediction system based on multi-dimensional features, such as image 3 As shown, the prediction system includes an acquisition module 301, a division module 302, a statistics module 303 and a prediction module 304, wherein:
[0044] The acquisition module 301 is configured to supplement and adjust the fragmented perceived lane markings based on crowdsourcing trajectories, and acquire smooth and complete lane sidelines;
[0045] The division module 302 is used to construct lanes with adjacent left and right lane markings, and divide road sections at positions where the number of lanes changes along the track driving direction to obtain multiple road sections;
[0046] Statistical module 303, used to count the distribution density of crowdsourcing trajectories in each road section, the ratio of perception and virtual supplement of the left side of the lane, the ratio of perception and virtual supplement of the right side of the lane, the ratio of each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More