Robot sorting system and method based on code scanning and attitude control, terminal and medium
A technology of attitude control and robotics, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve a large number of problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
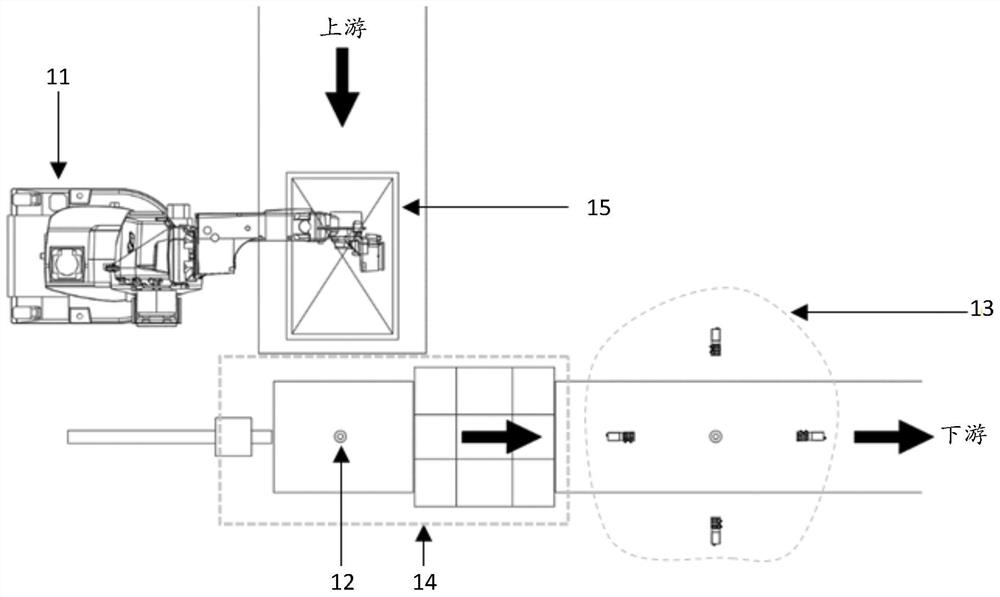
[0041] Such as figure 1 As shown, a schematic structural diagram of a robot picking system based on code scanning and gesture control in an embodiment of the present invention is shown. The robot picking system of this embodiment mainly includes: a picking robot 11 , a vision system (not shown), a first code scanning system 12 , a second code scanning system 13 , and a steering mechanism 14 . For the convenience of those skilled in the art to understand, each mechanism / system in the robot picking system will be further described below.
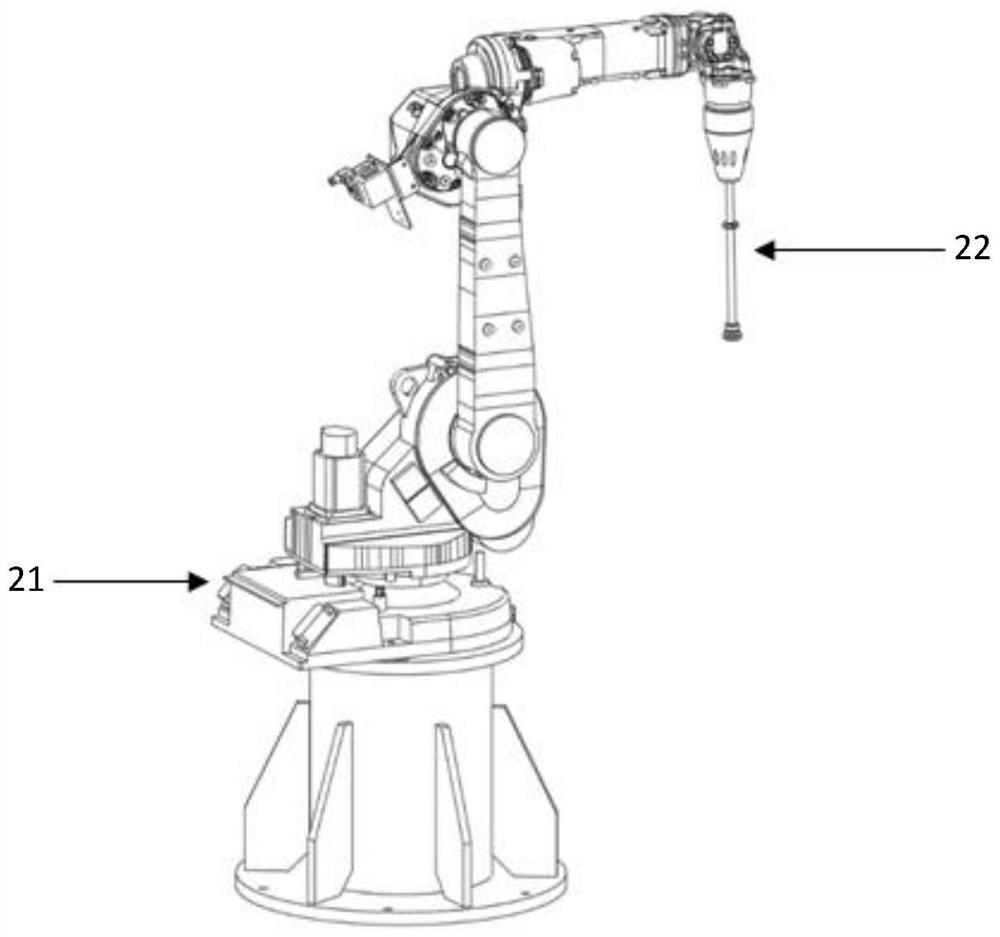
[0042] Such as figure 2 As shown, a schematic structural diagram of a picking robot in an embodiment of the present invention is shown. The picking robot of this embodiment includes a robot body 21 and an end effector 22 .
[0043] Optionally, the robot body 21 can be a multi-axis robot such as a six-axis robot, a four-axis robot, an eight-axis robot, an XYZ three-axis robot, or a parallel robot, or a Scara robot with three rotary joints t...
Embodiment 2
[0070] Such as Figure 10 As shown, it is a schematic flowchart of a robot picking method based on code scanning and gesture control in an embodiment of the present invention. The robot picking method in this embodiment can be applied to the picking robot in the above embodiments, and the specific process includes the following steps.
[0071] Step S101: Obtain the visual information and grasping posture information of the item to be picked.
[0072] Step S102: Move to the current location of the item to be selected according to the visual information of the item to be selected, and adjust the grasping posture of the end effector according to the grasping posture information to grab the item to be selected to the target position.
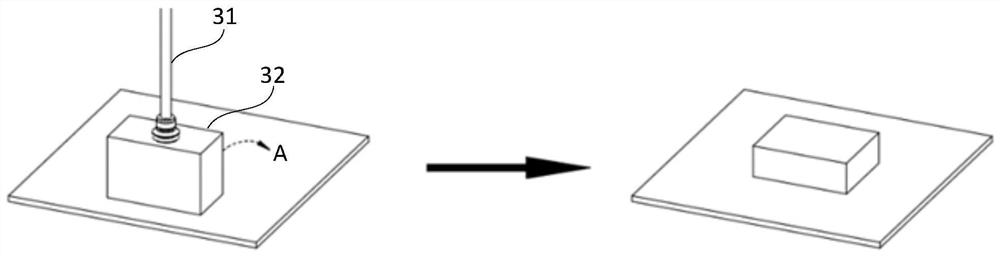
[0073] Step S103: Adjust the placement posture of the item to be selected, the placement posture includes a placement direction and / or a placement surface orientation.
[0074] It should be noted that the robot picking method based on code scannin...
Embodiment 3
[0076] Such as Figure 11 As shown, a schematic structural diagram of an electronic terminal in an embodiment of the present invention is shown. The electronic terminal provided in this example includes: a processor 111, a memory 112, and a communicator 113; the memory 112 is connected to the processor 111 and the communicator 113 through a system bus and completes mutual communication, and the memory 112 is used to store computer programs and communicate The device 113 is used to communicate with other devices, and the processor 111 is used to run a computer program to make the electronic terminal execute the steps of the robot picking method based on code scanning and gesture control.
[0077] The system bus mentioned above may be a Peripheral Component Interconnect (PCI for short) bus or an Extended Industry Standard Architecture (EISA for short) bus or the like. The system bus can be divided into address bus, data bus, control bus and so on. For ease of representation, o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com