

Low-voltage line fault positioning method and system based on wavelet transformation
A technology of fault location and wavelet transformation, which is applied to fault locations, information technology support systems, and fault detection according to conductor types, etc., can solve the problems of reduced positioning accuracy and positioning errors, and achieve stable operation, improve fault location accuracy, and improve Effect of Line Fault Location Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
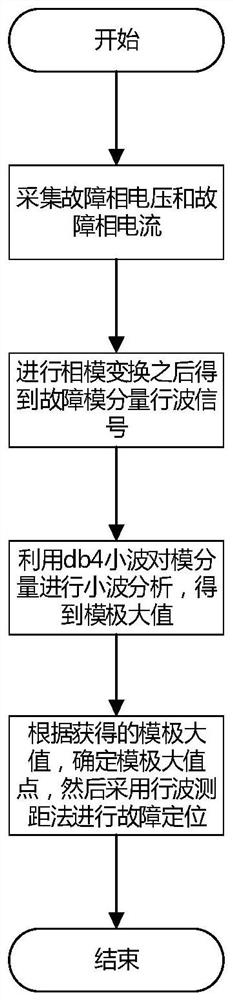
[0050] A low-voltage line fault location method based on wavelet transform, comprising the following steps:
[0051] S1: Collect the phase currents of A, B, and C phases when the line fails, and obtain the phase current fault component I A , I B , I C ;
[0052] S2: Perform phase-to-mode transformation on the fault component of the phase current to obtain the phase current I A , I B , I C The mode fault component traveling wave signal of ;
[0053] S3: Use db4 wavelet to conduct wavelet analysis on the α-mode fault component to obtain the maximum value of the mode;
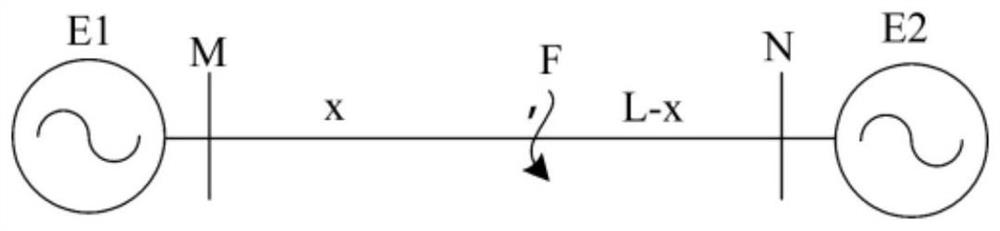
[0054] S4: According to the obtained modulus maximum value, determine the modulus maximum point, which is the moment when the traveling wave head reaches the M terminal and N terminal, and then use the traveling wave ranging method to locate the fault.
Embodiment 2
[0056] A low-voltage line fault location method based on wavelet transform, comprising the following steps:
[0057] S1: Collect the phase currents of A, B, and C phases when the line fails, and obtain the phase current fault component I A , I B , I C ;
[0058] S2: Perform phase-to-mode transformation on the fault component of the phase current to obtain the phase current I A , I B , I C The mode fault component traveling wave signal of ;
[0059] S3: Use db4 wavelet to conduct wavelet analysis on the α-mode fault component to obtain the maximum value of the mode;
[0060] S4: According to the obtained modulus maximum value, determine the modulus maximum point, which is the moment when the traveling wave head reaches the M terminal and N terminal, and then use the traveling wave ranging method to locate the fault.
[0061] The specific method of the step S2 is:
[0062] Phase current fault component I A , I B , I C Perform Clarke phase-mode transformation decouplin...
Embodiment 3
[0081] like image 3 As shown, the low-voltage line fault location system based on wavelet transform includes:
[0082] The phase current collection module 101 is used to collect the phase currents of the A, B, and C three-phase phases when a fault occurs in the line, and obtain the phase current fault component I A , I B , I c ;
[0083] The first processing module 102 is used to perform phase-to-mode transformation on the fault component of the phase current to obtain the phase current I A , I B , I C The mode fault component traveling wave signal of ;
[0084] The second processing module 103 is used to use the db4 wavelet to perform wavelet analysis on the α-mode fault component to obtain the maximum value of the mode;
[0085] The fault location module 104 is used to determine the modulus maximum point according to the obtained modulus maximum value, which is the moment when the traveling wave head reaches the M terminal and the N terminal, and then uses the travel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More