

AGV magnetic tracing offset calculation method, storage medium and AGV
A technology of offset calculation and calculation method, applied in non-electric variable control, instrument, two-dimensional position/channel control, etc., can solve the problem of large tracking error of AGV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
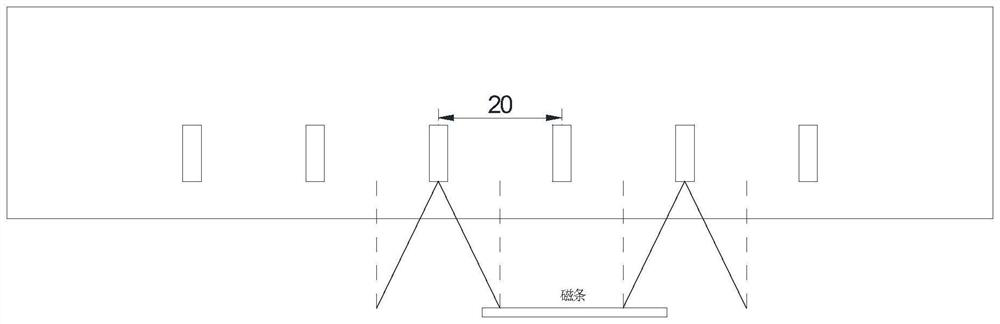
[0027] see Figure 1 to Figure 5 , the AGV magnetic tracking offset calculation method of the present invention, the AGV involved includes a car body, a control module and a magnetic tracking sensor, and the magnetic tracking sensor is provided with several magnetic induction probes in parallel, and the distance between adjacent magnetic induction probes is D, the distance from the ground of the magnetic tracking sensor is H, the detection width of the magnetic sensor probe to the ground is W, and the width of the magnetic strip is M, where W≥D, in this embodiment, the distance between adjacent magnetic sensor probes Set to D=20mm, the distance from the ground of the magnetic tracking sensor is set to H=40mm, the detection width of the magnetic sensor probe to the ground is set to W=20mm, and the width of the magnetic strip is set to M=30; the calculation method includes the following step:
[0028] a. Slowly move the magnetic strip from one side of the detection range of the...
Embodiment 2
[0050] The main purpose of this embodiment is to provide a storage medium that applies the method for calculating the AGV magnetic tracking offset in Embodiment 1. The storage medium stores a computer program, and the computer program is configured to implement the AGV magnetic tracking offset when called by the processor. Calculation method of tracking offset.
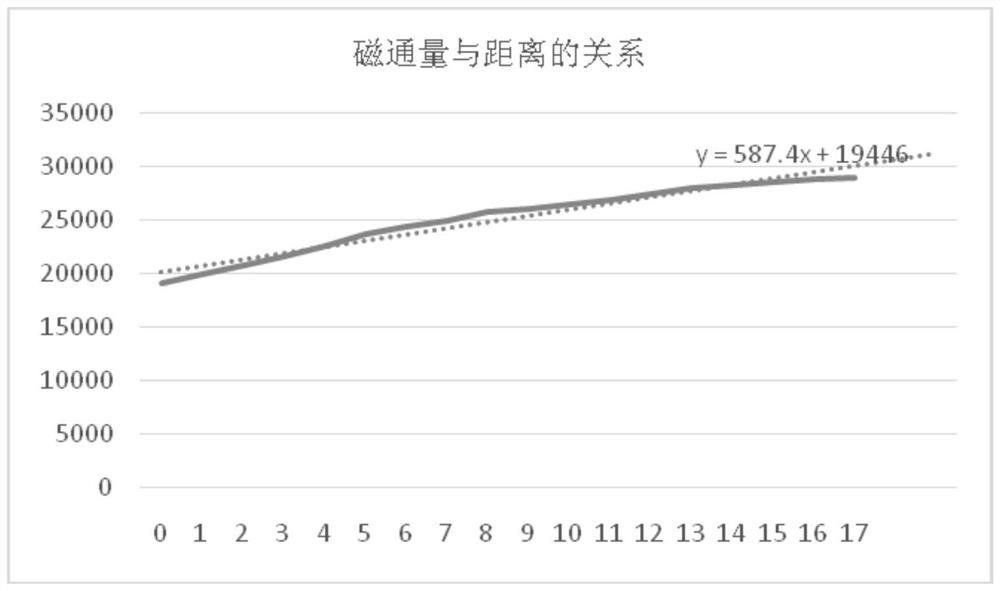
[0051] Compared with the prior art, the storage medium of the present invention detects the curve change relationship between the width X of the magnetic strip and the magnetic flux Y of the magnetic sensor probe through the introduction of the magnetic sensor probe, and the magnetic sensor probe that is triggered on the outermost side of the driving AGV Through the detection of the magnetic flux, the width of the magnetic sensor probe occupied by the magnetic strip can be obtained, so as to calculate the position offset of the AGV car body when driving along the magnetic strip. By adjusting the position offset, the AG...
Embodiment 3
[0053] The main purpose of this embodiment is to provide an AGV that applies the AGV magnetic tracking offset calculation method of Embodiment 1, including a car body, a processor and a memory arranged on the car body, the processor and the The memories communicate with each other, and the memories are used to store executable instructions, so that the processor implements the AGV magnetic tracking offset calculation method when executing the instructions.
[0054] Compared with the prior art, the AGV of the present invention detects the relationship between the width X of the magnetic strip and the magnetic flux Y of the magnetic sensor probe through the introduction of the magnetic sensor probe. The magnetic flux is detected to obtain the width of the magnetic sensor probe occupied by the magnetic strip, so as to calculate the position offset of the AGV car body when driving along the magnetic strip. By adjusting the position offset, the AGV can be prevented from derailing. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More