Compensation method and device for angle transmission error and computer readable storage medium
A compensation method and angle compensation technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of improving absolute accuracy, improving trajectory accuracy, and eliminating the influence of joint accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
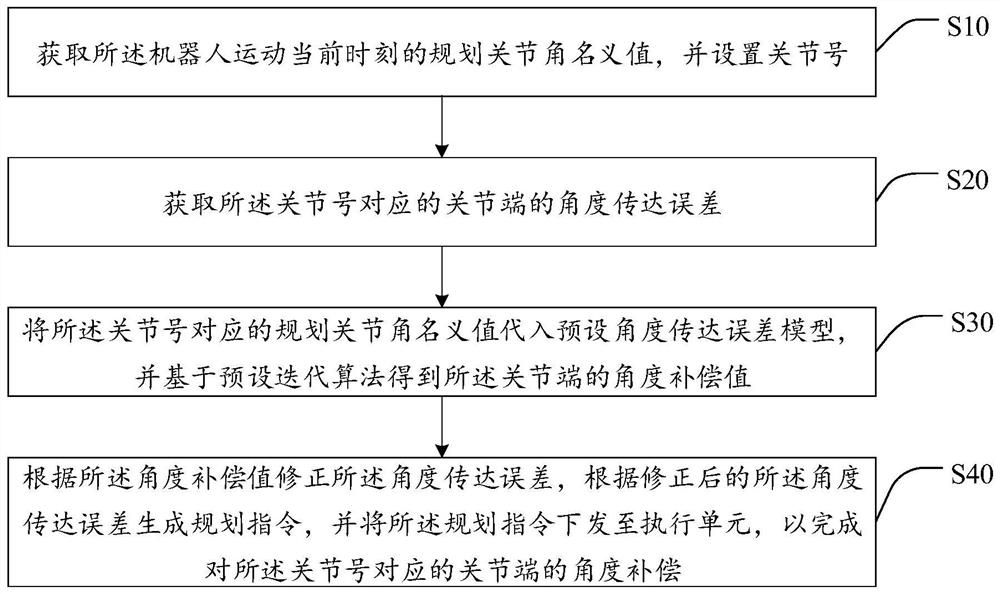
[0042] The main solution of the embodiment of the present invention is: a compensation method for angle transmission error is applied to a robot, comprising the following steps:
[0043] Obtain the nominal value of the planned joint angle at the current moment of the robot movement, and set the joint number;
[0044] Obtain the angle transmission error of the joint end corresponding to the joint number;
[0045] Substituting the nominal value of the planned joint angle corresponding to the joint number into a preset angle transmission error model, and obtaining the angle compensation value of the joint end based on a preset iterative algorithm;
[0046] The planning instruction of the joint end is corrected according to the angle compensation value, and the corrected planning instruction is sent to an execution unit,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More