Underground power grid inspection robot
A technology for inspection robots and underground power grids, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of wasting workers' time, tilting, and poor signals, and achieve the goal of saving electricity, saving time, and reducing costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
[0040] Wherein, the accompanying drawings are only for illustrative purposes, showing only schematic diagrams, rather than physical drawings, and should not be construed as limitations on this patent; in order to better illustrate the embodiments of the present invention, some parts of the accompanying drawings will be omitted, Enlarged or reduced, does not represent actual product size.
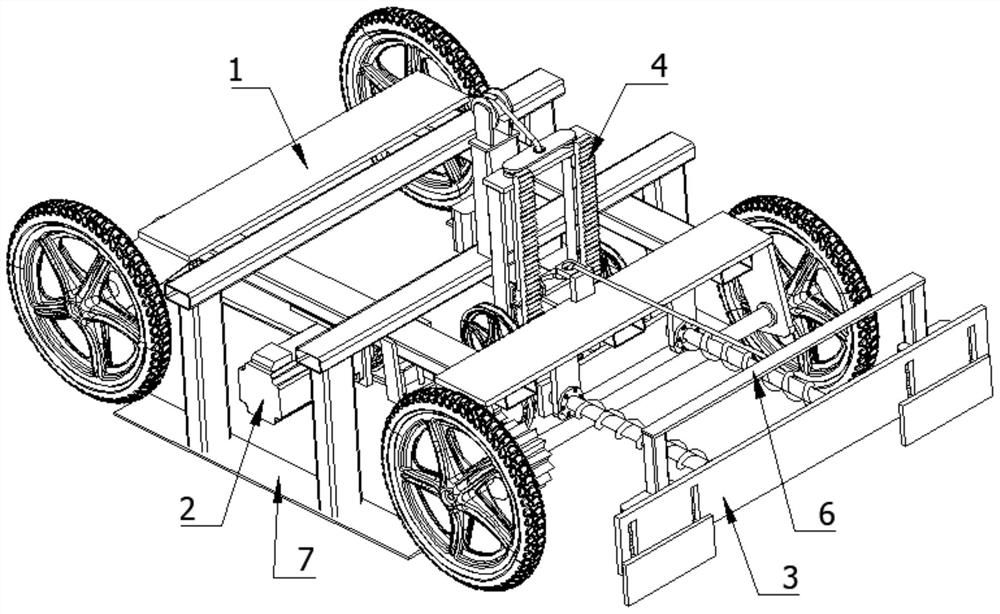
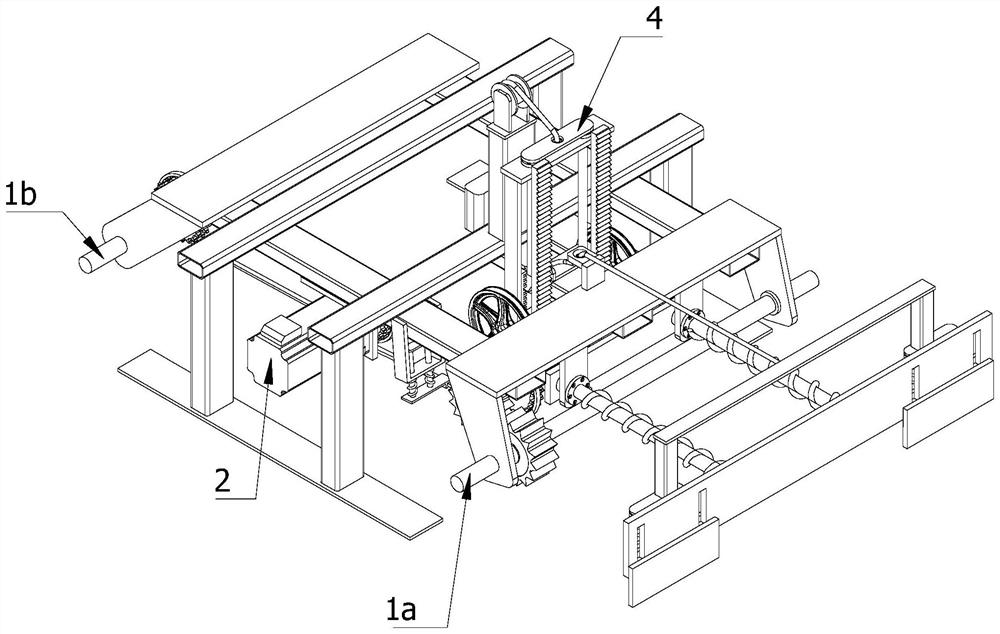
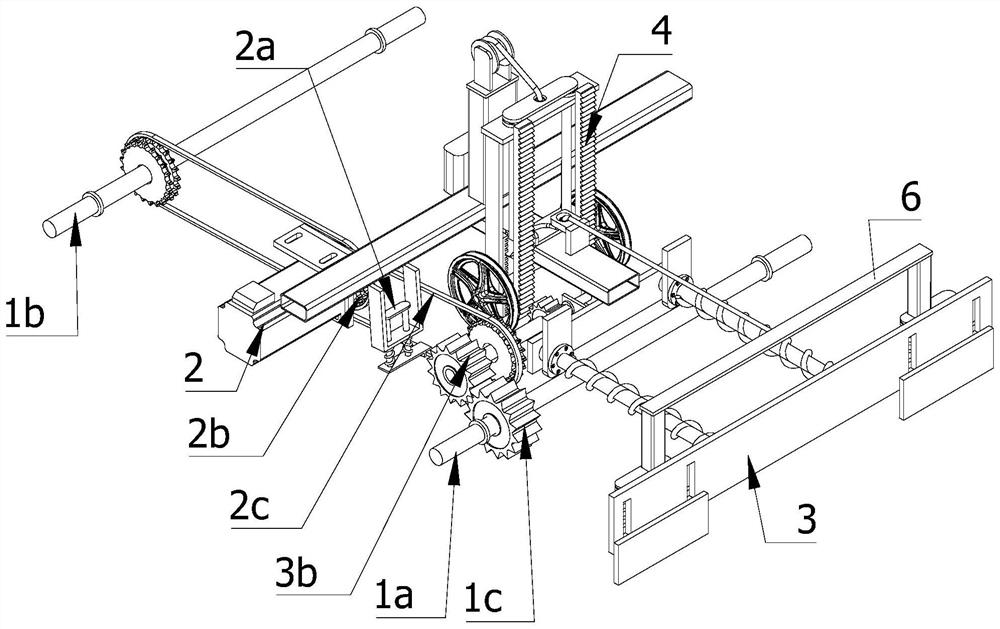
[0041] The invention provides a technical solution: as figure 1 , figure 2 and image 3 As shown, an underground power grid inspection robot includes a vehicle seat 1 and a driver 2. The vehicle seat 1 is provided with a rear power shaft 1b, and the driver 2 is fixedly installed on the vehicle seat 1 to drive the rear power shaft 1b to rotate. The vehicle seat 1 is also fixedly provided with a camera, a mobile...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com