Underwater robot bidirectional buoyancy adjusting device and adjusting method
An underwater robot and buoyancy adjustment technology, which is applied to underwater ships, hydroelectric power generation, underwater operation equipment, etc., can solve the problem that the amount of water increase is limited, the efficiency of manual exploration cannot be compared with that of underwater robots, and storage Water cannot come up and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the technical solutions of the present invention clearer and clearer to those skilled in the art, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
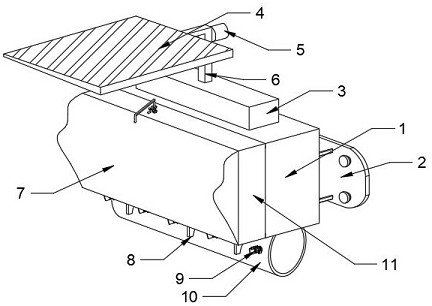
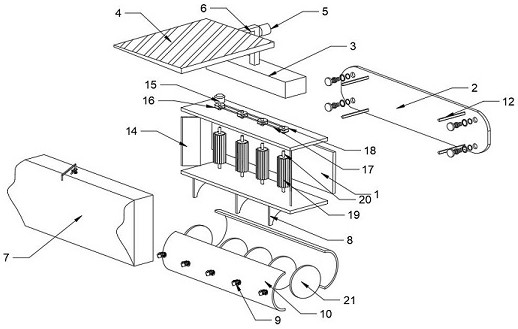
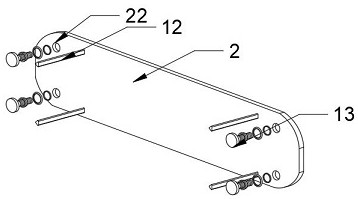
[0043] Such as Figure 1-Figure 9 As shown, a kind of underwater robot two-way buoyancy adjustment device provided by the present embodiment comprises a side fixed plate 2, and a fixed arm 12 is installed at the four corners of one side of the side fixed plate 2, and a fixed arm 12 is installed at the other end of the fixed arm 12; Power generation bin 1, inside the power generation bin 1 there are multiple sets of barb-type power generation roller assemblies distributed at equal intervals along the central axis of the bottom of the power generation bin 1, and the inner side of the power generation bin 1 is provided with a side sloping plate 14 inclined to the insid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com