

Multi-machine cooperative control system based on UR robot
A collaborative control and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as damaged charging guns, low intelligence, and position conflicts, and achieve cost savings, large data processing, and fast calculations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings, so that those skilled in the art can implement it with reference to the description.
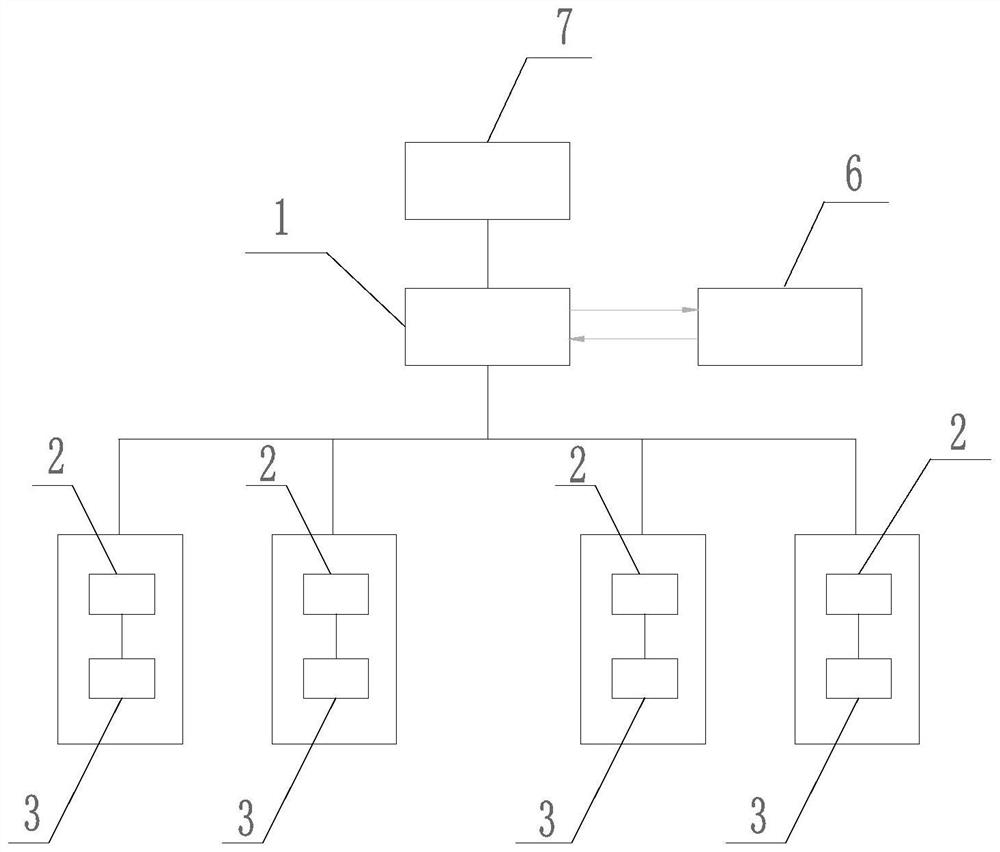
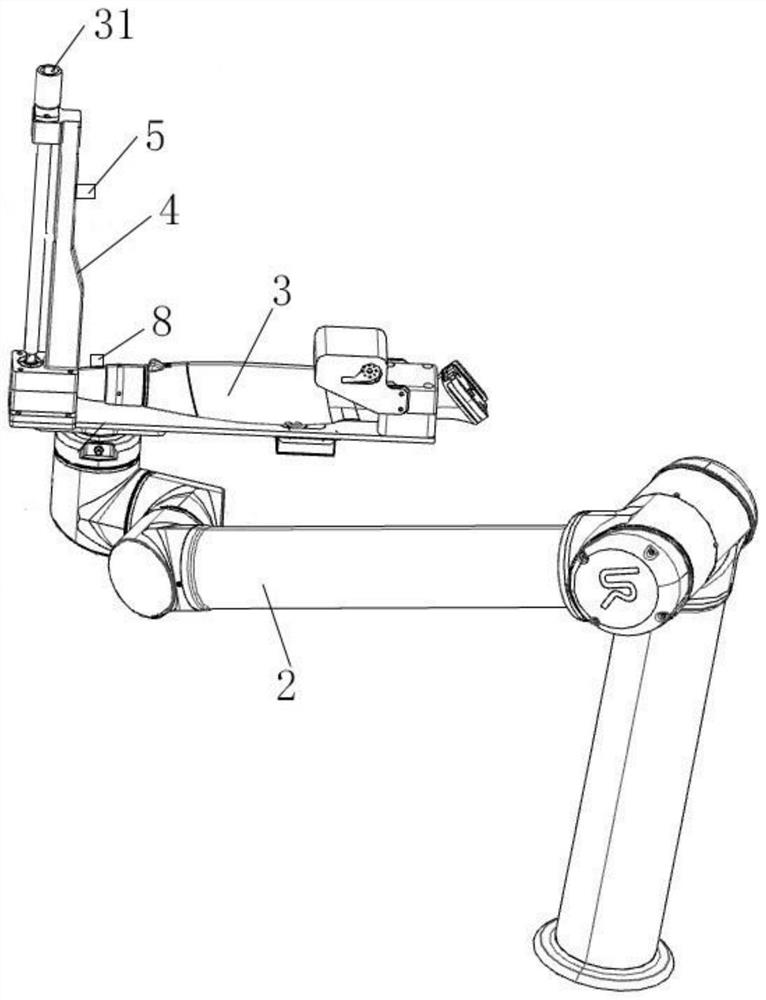
[0027] see Figure 1-2 As shown, the embodiment of the present invention discloses a multi-machine cooperative control system based on a UR robot, including a plurality of tightening modules and an industrial computer 1, and the tightening module includes a UR robot 2, a charging gun 3, a fixture 4 and a color sensor 5 , the UR robot 2 is connected to the fixture 4, the charging gun 3 is installed on the fixture 4, the charging gun 3 is used to tighten the bolt, the charging gun 3 is provided with a prompt light 8, the prompt light 8 is used to indicate the tightening result, and the color sensor 5 is used to The industrial computer 1 is electrically connected to the color sensor 5 , a plurality of UR robots 2 and a plurality of charging guns 3 respectively by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More