

Vehicle trajectory prediction method based on vehicle behavior characteristics and environment interaction information
A technology for interacting information and vehicle trajectories, applied in the field of autonomous vehicles, can solve problems such as unsatisfactory accuracy, and achieve the effect of improving accuracy, prediction time length, and accurate prediction results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0029] The present application discloses a vehicle trajectory prediction method based on vehicle behavior characteristics and environmental interaction information. The method includes the following steps:
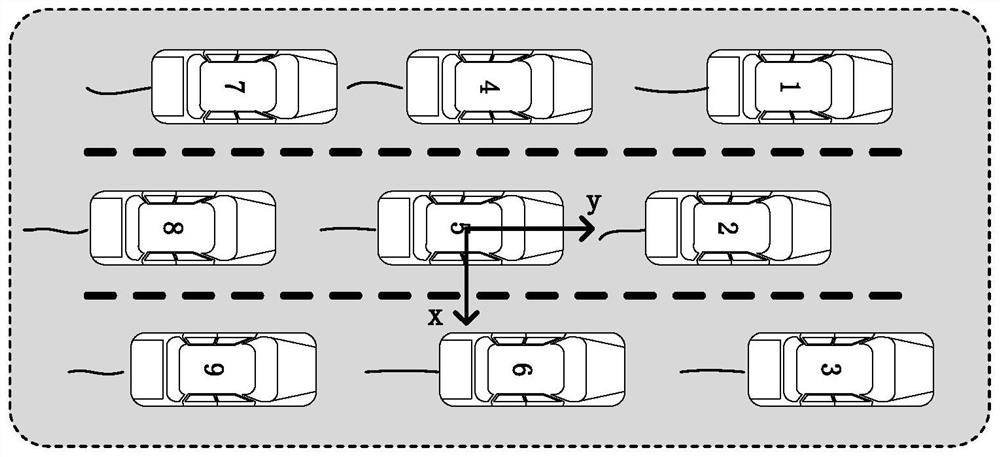
[0030] Step 100, acquiring the historical trajectory sequence of the scene vehicle in the scene where the target vehicle is located.
[0031] The historical trajectory sequence of each scene vehicle includes the position information of each sampling time point within the last predetermined time period T1 of the scene vehicle before the current moment. Generally, samples are taken at equal time intervals during sampling, that is, the time interval Δt between every two adjacent sampling time points is equal. In order to better extract vehicle behavior features and environment interaction information, the last predetermined time period T1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More