Path planning method for fuzzy operation of machine vision data
A technology of fuzzy computing and path planning, applied in the field of robot rescue, it can solve the problems of economic loss, high accident probability in dangerous areas, and blocked paths, so as to reduce economic losses, avoid delaying rescue speed, and avoid damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
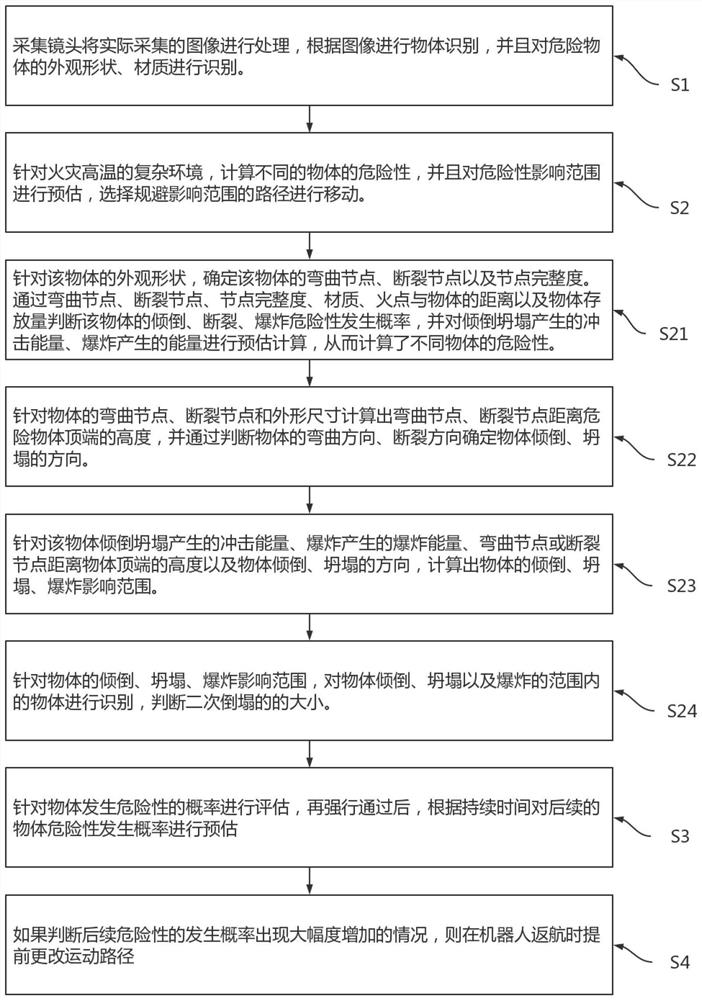
[0026] Step S1: The acquisition lens processes the actually collected images, performs object recognition based on the images, and recognizes the appearance, shape and material of dangerous objects.
[0027] The acquisition lens is mainly used to collect objects in the forward direction of the robot. In practical applications, in order to judge the accuracy of recognition, a GPS positioning system can be installed inside the robot. At the same time, a memory is set inside the robot. In the area, the drawings are stored in the robot through the storage, and the robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com