Vehicle-road cooperative auxiliary driving system and method
A vehicle-road coordination and assisted driving technology, which is applied to the traffic control system of road vehicles, traffic control systems, vehicle components, etc., to achieve the effects of reducing costs, improving accuracy, and improving traffic efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
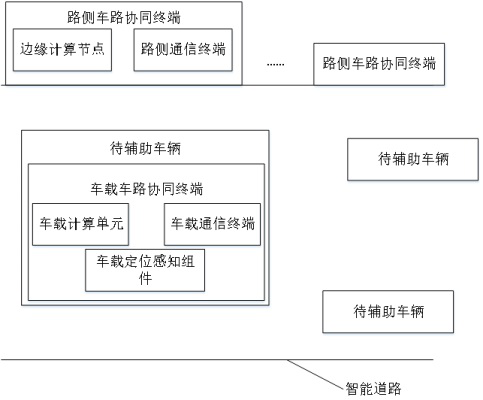
[0056] Such as figure 1 As shown, a vehicle-road coordination assisted driving system includes several roadside vehicle-road coordination terminals and several vehicle-mounted vehicle-road coordination terminals arranged on smart roads. The smart road is dedicated to vehicles with automatic driving and vehicle-road coordination capabilities, and vehicles that do not have automatic driving and vehicle-road coordination capabilities are not allowed to enter and drive.
[0057] Each of the roadside vehicle-road coordination terminals is assigned a certain range of management roads, and a preset distance is set according to the range, and the roadside vehicle-road coordination terminals are uniformly arranged on one side of the intelligent road. There is an overlapping area in the management road range of each adjacent roadside vehicle-road coordination terminal, so that the entire smart road is in the management road range of the roadside vehicle-road coordination terminal, and t...
Embodiment 2
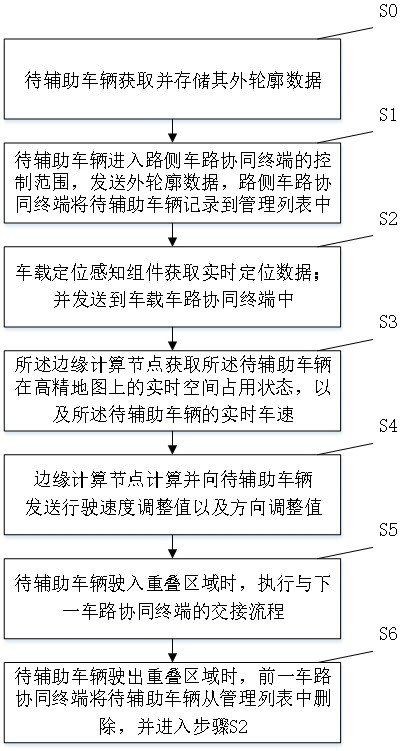
[0062] Such as figure 2 As shown, this embodiment is a vehicle-road cooperative assisted driving method based on the system described in Embodiment 1, and the specific steps are as follows:
[0063] S0: The on-board computing unit of the vehicle to be assisted acquires and stores the outer contour data of the vehicle to be assisted.
[0064] S1: After the vehicle to be assisted enters the control range of the roadside vehicle-road coordination terminal, automatically send the outline data of the vehicle to be assisted to the roadside vehicle-road coordination terminal, and the roadside vehicle-road coordination terminal will The auxiliary vehicles to be numbered and recorded in the management list;
[0065] When the auxiliary vehicle enters the vehicle-road coordination road, it establishes contact with the roadside vehicle-road coordination device through the vehicle-mounted communication terminal and the roadside communication terminal. The coordination device is marked a...
Embodiment 3
[0079] This embodiment is a specific calculation process of the driving speed adjustment value and the direction adjustment value described in Embodiment 2. Include the following steps:
[0080] S431: Determine the driving control reference vehicle of each lane in the current control cycle;
[0081] Obtain the vehicle to be assisted at the front position on lane i within the control range of the vehicle-road coordination device as the leading vehicle of lane i; and determine whether there are other vehicles within the distance of s(i) ahead of the leading vehicle Vehicle; Wherein, s (i) is the adjacent vehicle longitudinal spacing threshold of i lane;
[0082] If there are other vehicles in front of the first vehicle in the handover area, a vehicle to be assisted directly in front of the first vehicle is used as the driving control reference vehicle of lane i;
[0083] If not, then take the first vehicle as the driving control reference vehicle of lane i;
[0084] S432: Det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More