

Formation Reconfiguration Control System of Quadrotor UAV Based on ADP and Obstacle Avoidance Mechanism
A quadrotor UAV, formation reconstruction technology, applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of low convergence speed, difficult flight controller design, and easy strong coupling characteristics. Issues such as external interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
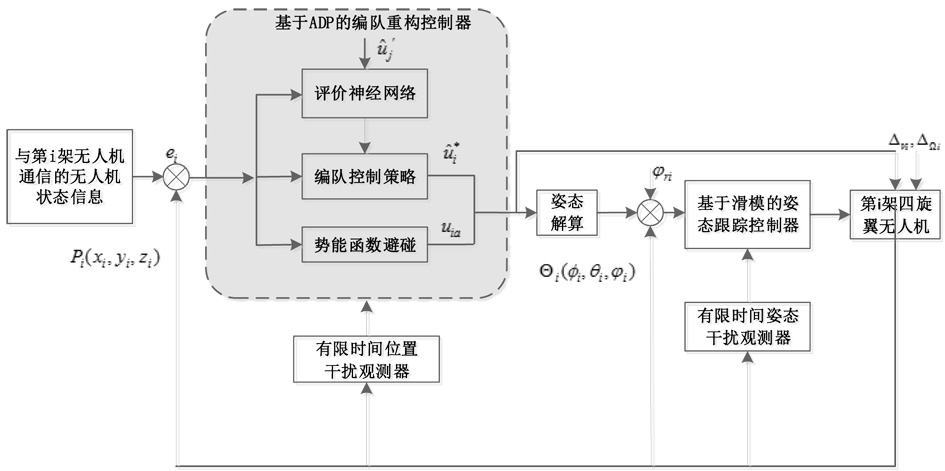
[0033] Aiming at the problem of formation reconfiguration control of quadrotor UAV under the influence of external comprehensive interference, this embodiment constructs a limited-time interference observer based on sliding mode, an outer-loop formation reconfiguration controller based on ADP and obstacle avoidance mechanism, and a sliding-based The finite-time attitude tracking controller of the modular model realizes the formation, maintenance and reconfiguration control of multi-UAV formations under the influence of comprehensive disturbances. The present invention will be further described below with reference to the accompanying drawings.
[0034] 1. Establish a UAV formation model under the influence of interference.
[0035] considered by A formation system composed of four quadrotor UAVs, the first The six-degree-of-freedom mathematical model of a quadrotor UAV is expressed as
[0036]
[0037] In the formula, and are the position vector and velocity vector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More