

Four-rotor unmanned aerial vehicle formation reconstruction control system based on ADP and obstacle avoidance mechanism
A four-rotor UAV and formation reconfiguration technology, applied in three-dimensional position/channel control, etc., can solve the problems of strong coupling characteristics that are susceptible to external interference, difficult flight controller design, and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
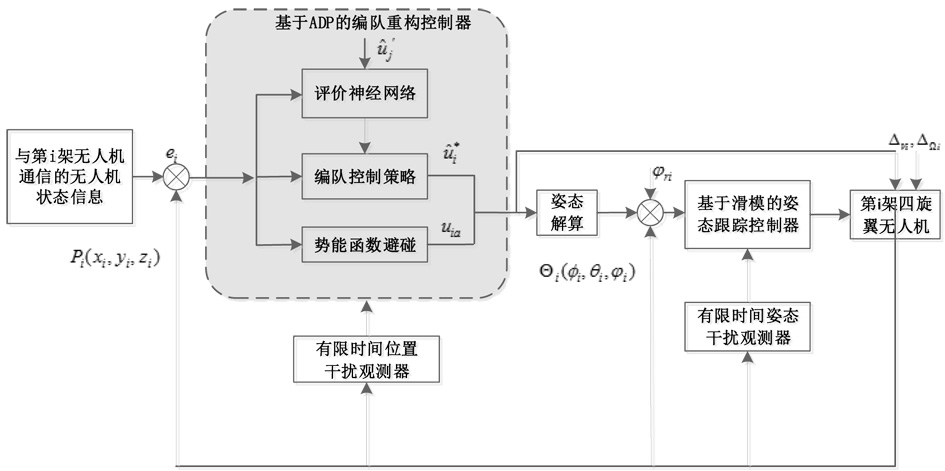
[0033] Aiming at the problem of four-rotor UAV formation reconfiguration control under the influence of external comprehensive interference, this embodiment constructs a finite-time interference observer based on sliding mode, an outer ring formation reconfiguration controller based on ADP and obstacle avoidance mechanism, and a sliding-based UAV formation reconfiguration controller. The finite-time attitude tracking controller of the model realizes the formation, maintenance and reconfiguration control of multi-UAV formation under the influence of comprehensive disturbance. The present invention will be further described below in conjunction with the accompanying drawings.
[0034] 1. Establish a UAV formation model under the influence of interference.
[0035] considered by A formation system composed of quadrotor UAVs, the first The six-degree-of-freedom mathematical model of a quadrotor UAV is expressed as
[0036]
[0037] In the formula, and are the position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More