

Method for optimizing inspection operation path of unmanned vehicle
A path optimization, unmanned vehicle technology, applied in the direction of road network navigator, navigation, instruments, etc., can solve problems such as inability to bypass and hinder the application of unmanned vehicles
Pending Publication Date: 2022-05-06
北京励图锐新科技有限公司
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0002] With the promotion of unmanned driving technology, products based on L4 unmanned driving technology are constantly being updated, especially in the fields of logistics, food delivery, park inspection, etc., and a certain scale of application has been formed. Demand, the L4 unmanned inspection vehicle has the characteristics of high positioning accuracy, strong arm barrier capability, and large load space, and is widely used by users. With the deepening of applications, the disadvantages of unmanned vehicles are gradually emerging. Unmanned vehicles often get stuck, unable to bypass obstacles, and do not move for a long time. These problems are hindering the application of unmanned vehicles
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
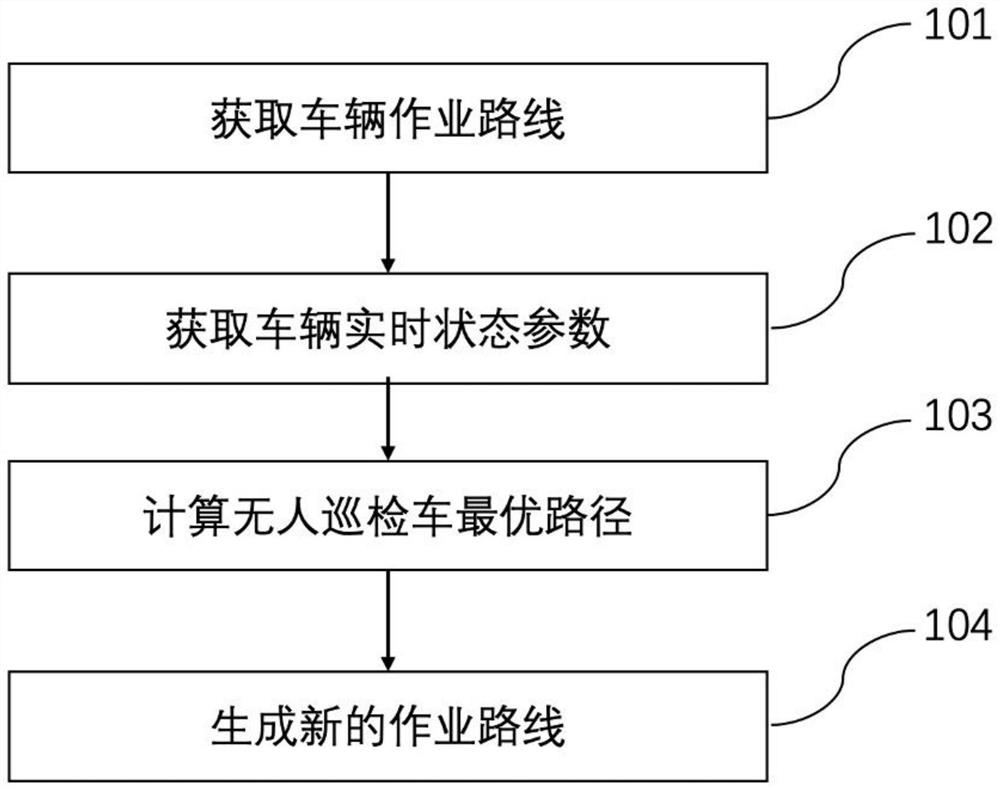
[0012] 1. Obtain the unmanned vehicle inspection operation path through the TCP / IP protocol, but not limited to obtain data through the Internet and local area network.
[0013] 2. Through WEBSOCKET, MQ and other protocols, obtain real-time status data of unmanned vehicles, including real-time data of radar and visual recognition equipment, and vehicle early warning data.
[0014] 3. When the state of the unmanned vehicle is that no one reaches the inspection target, the system automatically calculates the optimal path of the unmanned inspection vehicle and generates new path data for the inspection vehicle.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The embodiment of the invention provides a working path optimization method for an unmanned inspection vehicle, and provides a technical scheme of edge end route optimization calculation, vehicle running state real-time monitoring and working path real-time feedback based on the parking position of the unmanned inspection vehicle. According to the method, the operation path of the unmanned inspection vehicle is optimized and calculated, so that the running track of the unmanned inspection vehicle can be adjusted in real time, the problems that the vehicle is stuck, cannot move and deviates in running are solved, and the running efficiency of the unmanned inspection vehicle can be greatly improved.
Description
technical field [0001] This application relates to the technical field of information data processing and transmission, and mainly relates to a method for optimizing the inspection operation path of unmanned vehicles. Background technique [0002] With the promotion of unmanned driving technology, products based on L4 unmanned driving technology are constantly being updated, especially in the fields of logistics, food delivery, park inspection, etc., and a certain scale of application has been formed. Demand, the L4 unmanned inspection vehicle has the characteristics of high positioning accuracy, strong arm barrier capability, and large load space, and is widely used by users. With the deepening of applications, the disadvantages of unmanned vehicles are gradually emerging. Unmanned vehicles often get stuck, unable to bypass obstacles, and do not move for a long time. These problems are hindering the application of unmanned vehicles. Contents of the invention [0003] The...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G01C21/34
CPCG01C21/3415
Inventor潘正义夏天庆王克强
Owner北京励图锐新科技有限公司