

Wearable flexible lower limb assisting exoskeleton robot
An exoskeleton robot, wearable technology, applied in the directions of manipulators, program-controlled manipulators, joints, etc., can solve the problems of increased joint weight and complexity, large deflection inertia of lower limb motion, high R&D and use costs, and increase the flexibility of movement. The effect of reducing the motion deflection inertia and preventing secondary damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is described in further detail now in conjunction with accompanying drawing.
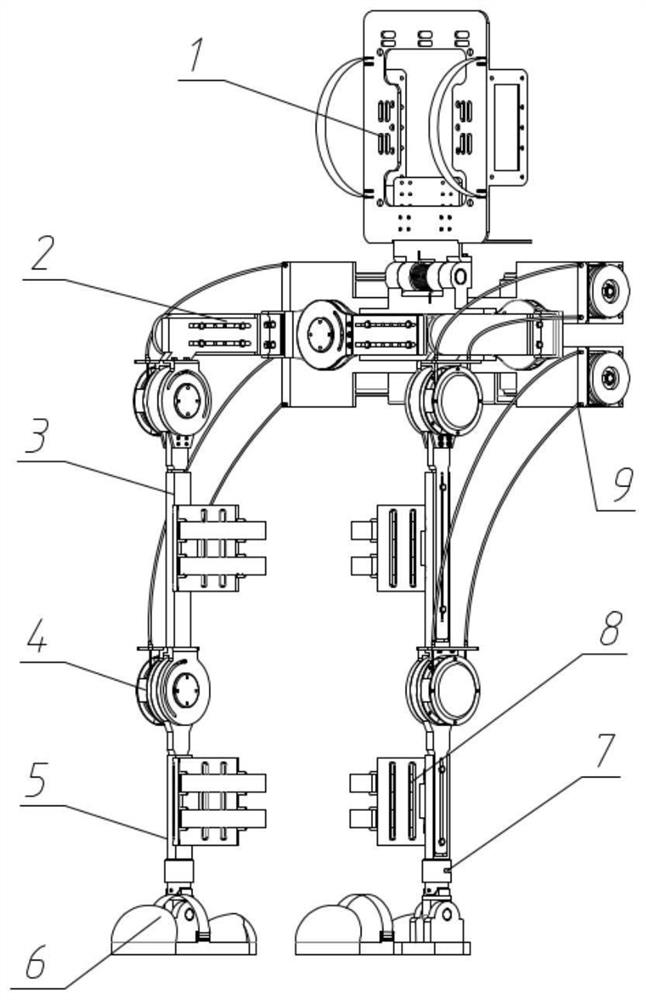
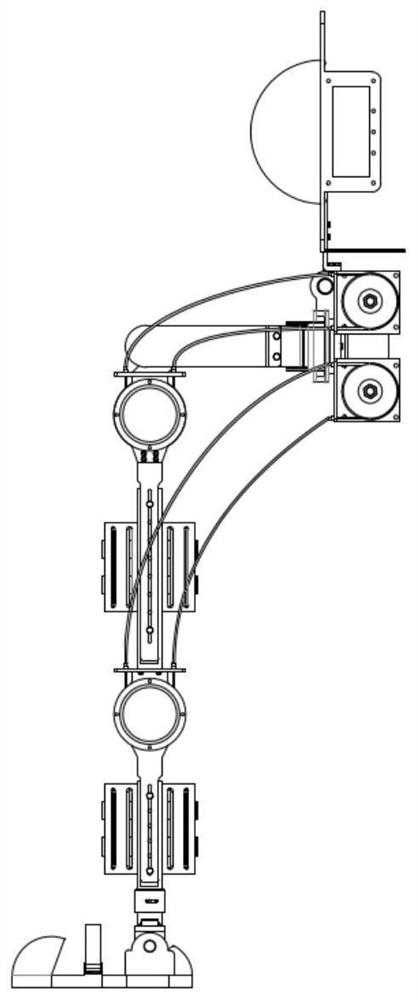
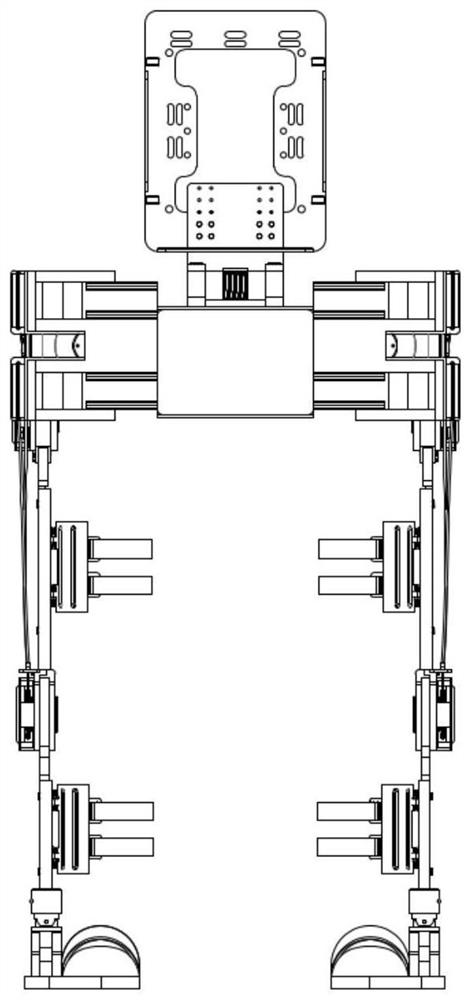
[0039] Such as Figure 1 to Figure 18 The wearable flexible lower limb power-assisted exoskeleton robot includes a back assembly 1, a hip joint part 2, a thigh part 3, a knee joint part 4, a lower leg part 5, a foot part 6, an ankle joint part 7, a floating binding Device 8 and transmission-drive system 9, said back assembly 1 is located above the hip joint part 2, said thigh part 3, knee joint part 4, lower leg part 5, ankle joint part 7 and foot part 6 are in turn attached to the hip joint Below the component 2, the floating binding device 8 is located inside the thigh component 3 and the calf component 5, the transmission-drive system 9 is located behind the hip joint component 2, and the overall exoskeleton has a left-right symmetrical structure.
[0040] Specifically, the back assembly 1 includes a back strap 11, a back plate 12, a back connecting plate 13, a back ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More