

Robot multi-task motion implementation method based on sequential logic, medium and equipment
A technology of sequential logic and implementation method, applied in complex mathematical operations, two-dimensional position/channel control, etc., can solve problems such as unable to find robust solutions, unable to find robots, unable to express user preferences, etc., to improve efficiency , the effect of reducing computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments.
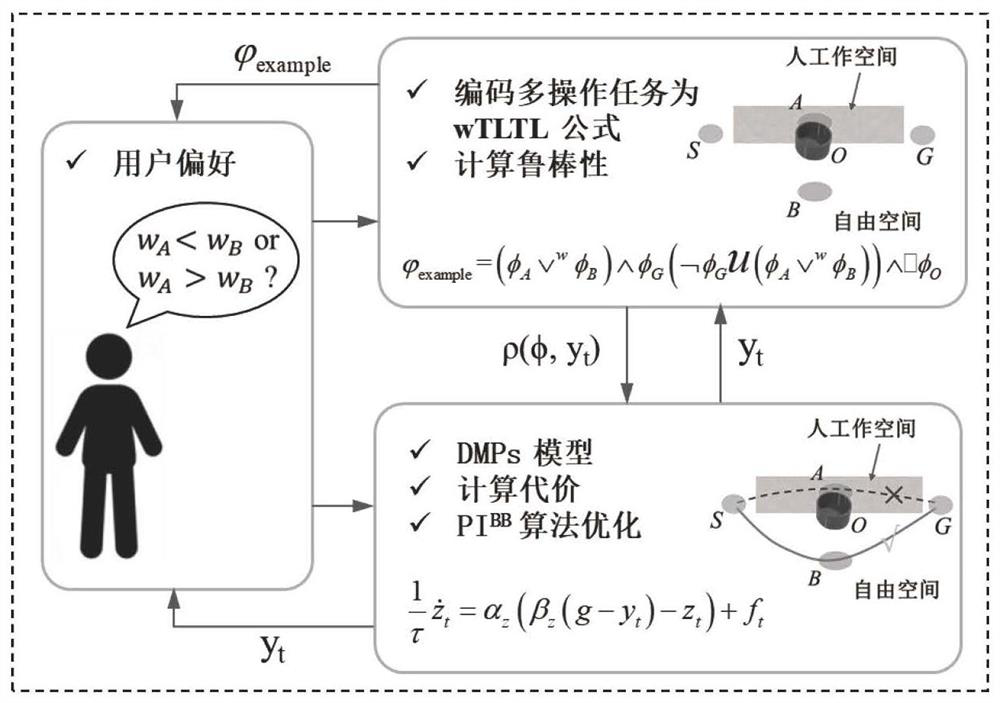
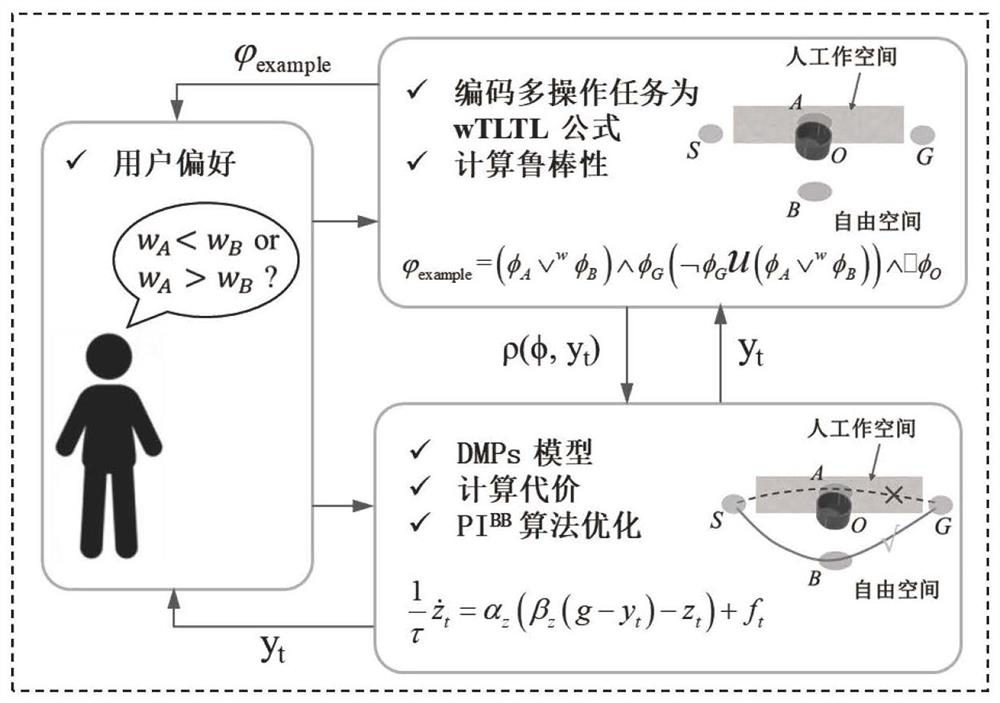
[0077] A multi-task motion planning method for a robot based on sequential logic in an embodiment of the present invention, the schematic diagram of its architecture is as follows figure 1 As shown, traditional TLTL is extended to wTLTL, and DMPs and wTLTL are combined to achieve complex manipulation tasks with user preferences.
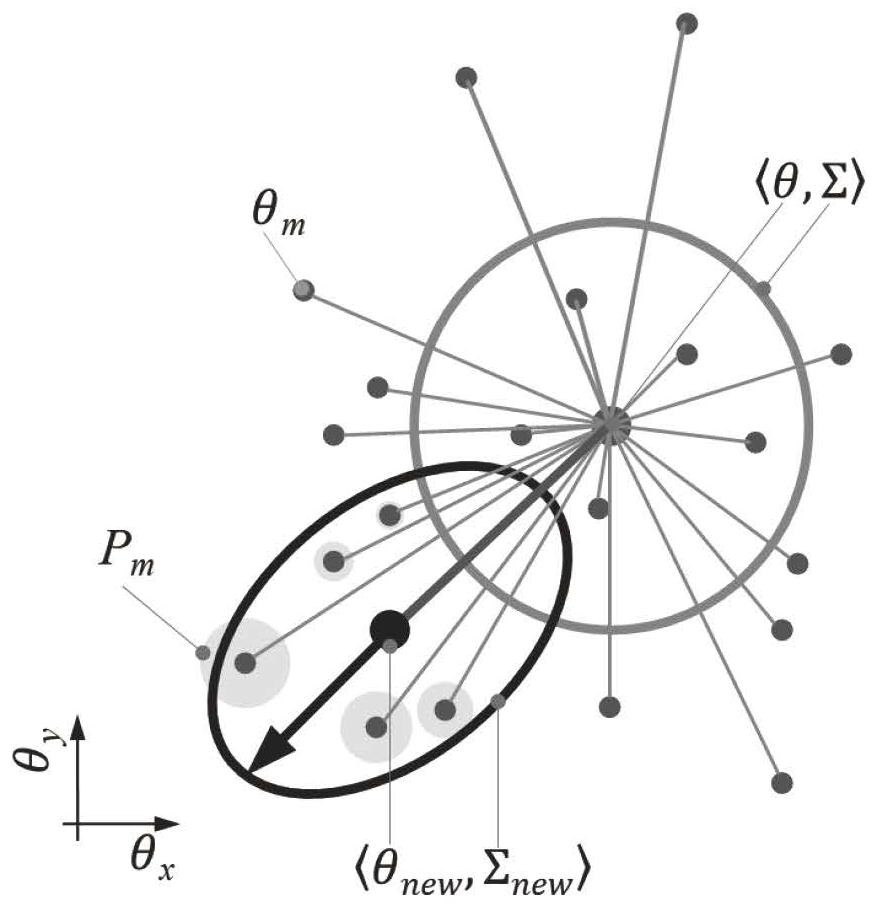
[0078] The DMPs are used to approximate trajectories with user preferences, and the trajectory shape is determined by DMPs parameters and optimized by a black-box optimization strategy based on weighted average covariance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More