

Smooth path planning method based on whale optimization algorithm
A technology of path planning and optimization algorithm, applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, it can solve the problems of slow speed and low accuracy, and achieve faster diversity and better coverage. Space, the effect of enhancing diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
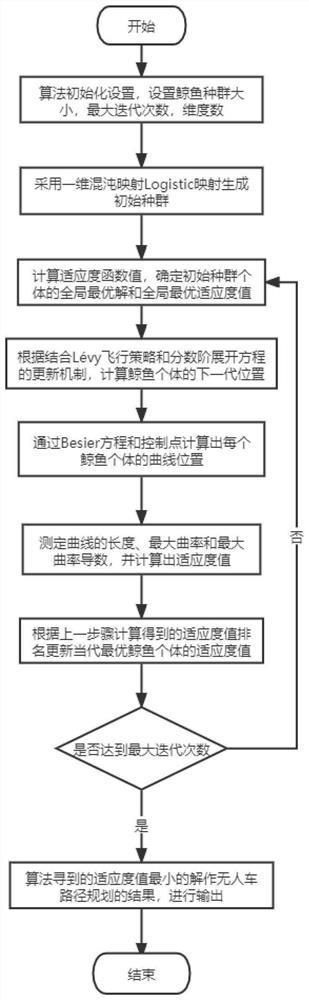
[0047] The purpose of the present invention is to improve the existing algorithm for the problem of low speed and low precision in the static path planning of the current unmanned vehicle, optimize the whale algorithm for this scene, improve the success rate of the search path, and The curvature and curvature derivative of the final path should be lower as much as possible to bring more safety to the robot operation.
[0048] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without maki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More