

Unmanned aerial vehicle maneuvering avoidance decision-making method based on deep reinforcement learning
A technology that reinforces learning and decision-making methods, applied in non-electric variable control, vehicle position/route/altitude control, instruments, etc., can solve problems such as policies tending to be unsatisfactory behaviors, achieve a wide range of application scenarios, and improve data utilization efficiency , The system framework is complete and reliable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. Of course, the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
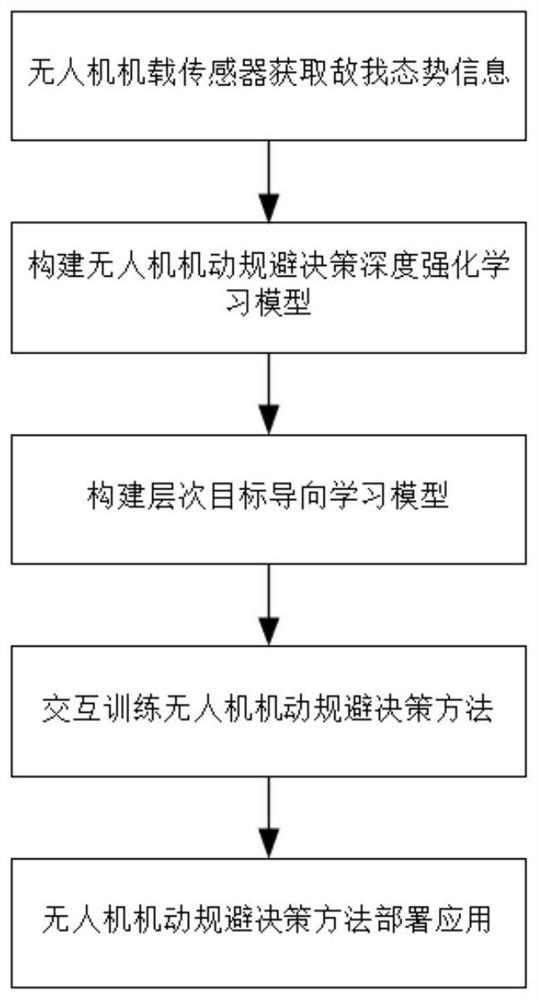
[0065] The present invention provides a UAV maneuver avoidance decision-making method based on deep reinforcement learning, such as figure 1 shown, including the following five steps:
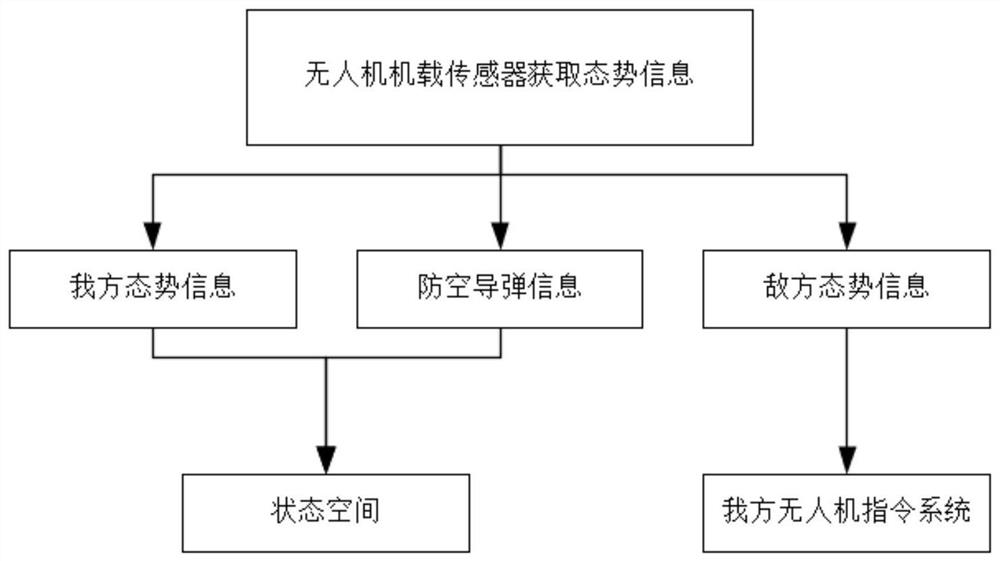
[0066] Step 1. Obtain the situation information of the enemy and the enemy according to the UAV airborne sensor system;
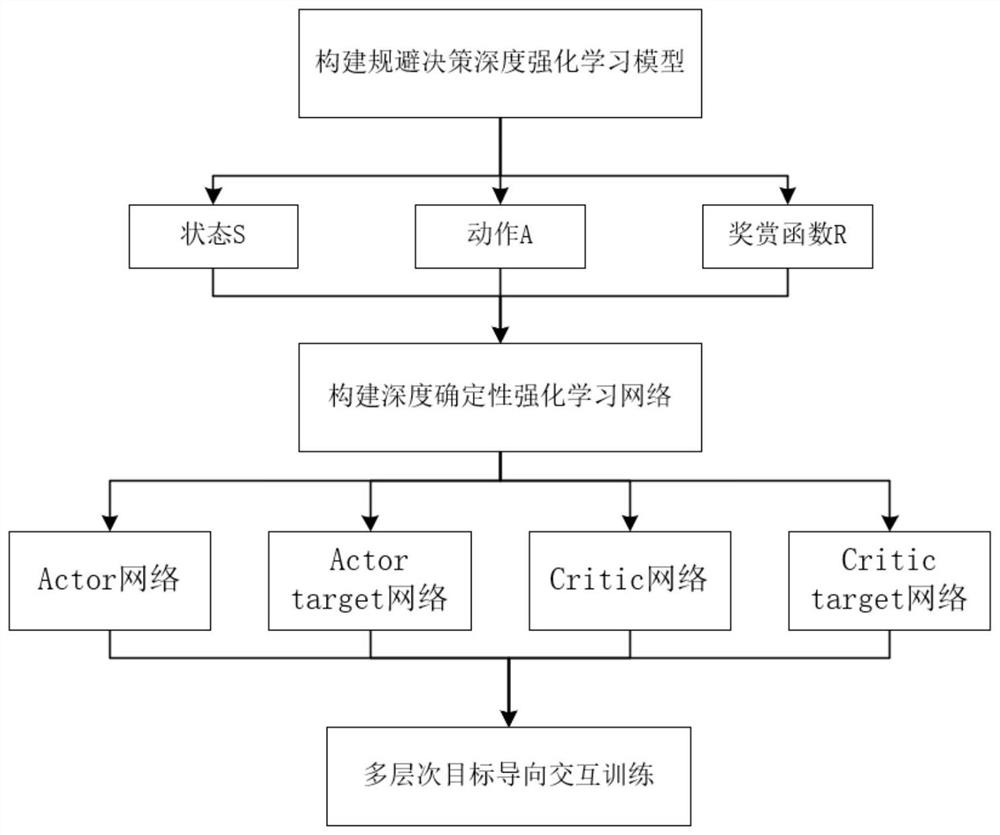
[0067] Step 2. Construct the UAV maneuver avoidance decision-making deep reinforcement learning model structure;
[0068] Step 3, constructing a hierarchical goal-oriented learning model structure;
[0069] Step 4. Complete the learning of the UAV maneuver avoidance decision-making method according to the inter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More