

Jump point search path planning method in dynamic scene
A technology for searching paths and dynamic scenes, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of reducing algorithm operation efficiency, inability to handle dynamic map changes, and operating efficiency Insufficient and other problems, to achieve the effect of reducing node exploration time, reducing time complexity, and ensuring optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
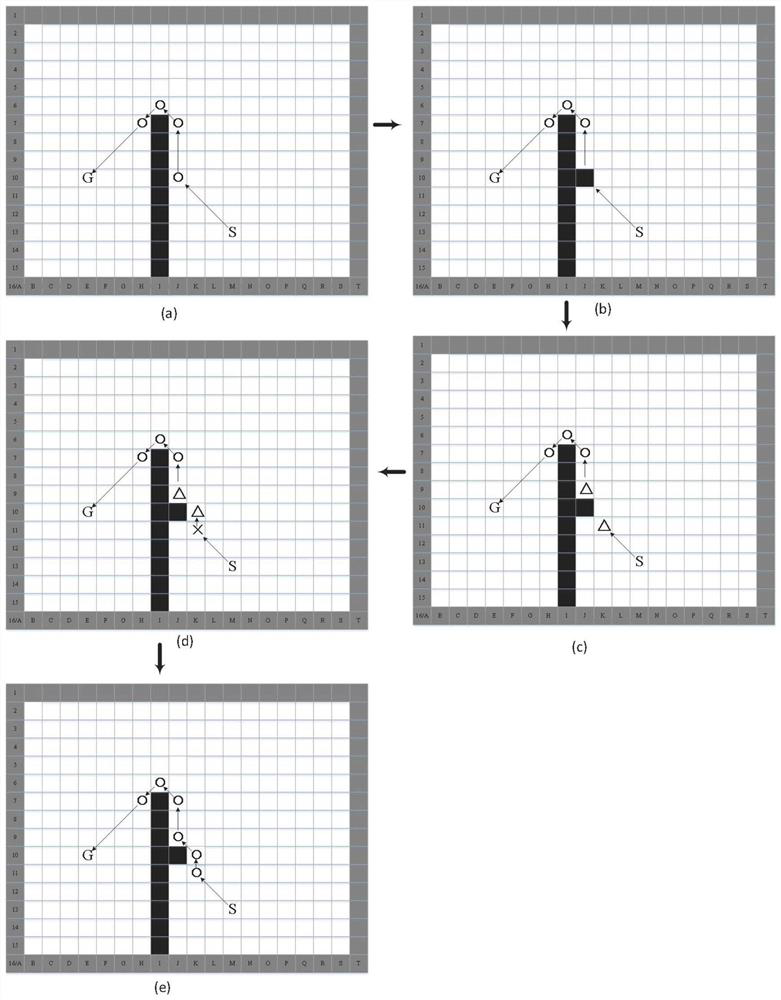
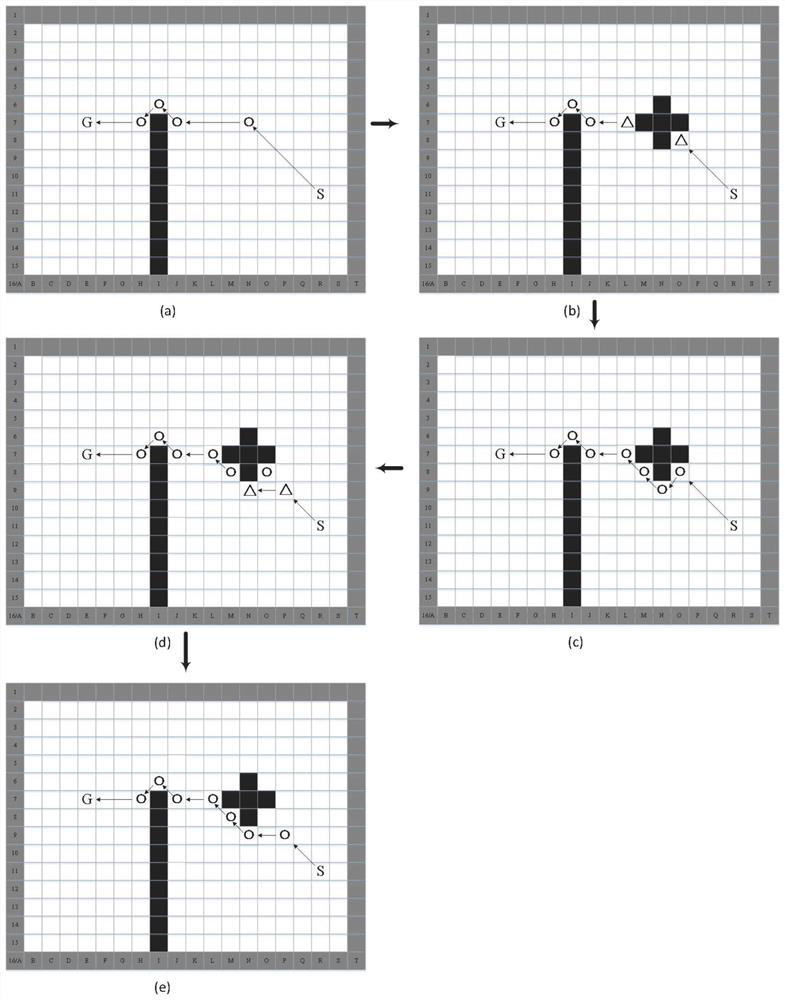
[0081] In order to explain the operation mode and advantages of the present invention more clearly, the following combines the simulation diagrams to analyze the operation effects in different scenarios, restore the operation logic of the algorithm, and further describe the present invention in detail.
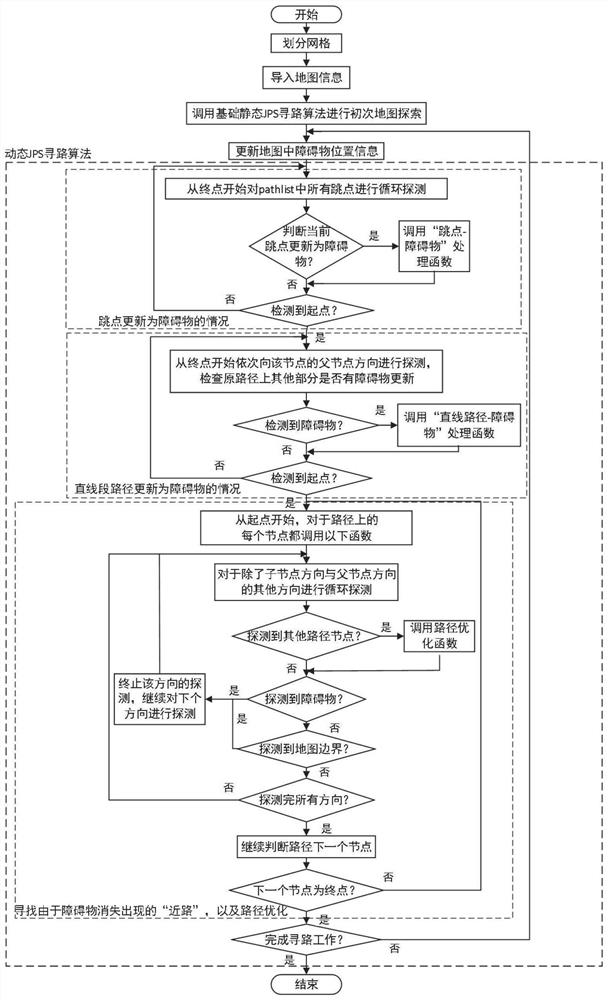
[0082] The present invention provides a jump point search path planning method in a dynamic scene, which specifically includes the following steps:
[0083] S1. Use the grid method to divide the map into areas, scan the location of obstacles, and mark the corresponding grid as an unwalkable area;
[0084] S2. Run the static JPS algorithm to complete the initial pathfinding exploration, specifically including the following sub-steps:
[0085] S21. Push the starting point into the OpenList;
[0086] S22. Add the neighbor nodes in the direction of the corresponding neighbor node of the current node to the neighbor array. If the current node is the starting point, judge all eight...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More