Method for avoiding singular points of redundant mechanical arm
A technology of manipulators and singular points, applied in the field of redundant manipulator control, can solve problems such as inability to use non-spherical wrist manipulators and large computing loads, and achieve the effect of meeting real-time requirements, high real-time performance, and improving trajectory accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
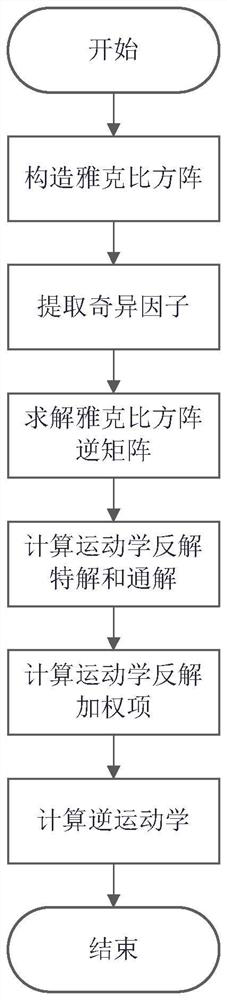
[0034] like figure 1 As shown, a redundant manipulator singularity avoidance method includes the steps in the following sequence:
[0035] (1) By reducing the dimension of the Jacobian matrix of the redundant manipulator, construct the Jacobian square matrix J q ;
[0036] (2) Derive the Jacobian matrix J q The singular factor k of i , and use the approximate damped reciprocal method to solve the Jacobian square matrix J q The inverse matrix J q -1 ;
[0037] (3) Through the Jacobian matrix J q The inverse matrix J q -1 Solving the general solution of inverse kinematics for redundant manipulators and special solution
[0038] (4) Using the optimized gradient projection algorithm to solve the inverse kinematics weighting term of the redundant manipulator Obtain the inverse kinematics of the redundant manipulator The singularity avoidance of redundant manipulators is realized.
[0039] The step (1) specifically refers to: first, calculating the Jacobian matrix...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap