

Accurate positioning method for unmanned engineering operation equipment in complex environment
A technology for unmanned driving and operating equipment, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve problems such as inaccurate positioning of engineering operating equipment, achieve increased positioning reliability, simple structure, and low price cheap effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0075] A precise positioning method for unmanned engineering operation equipment used in complex environments. When GPS positioning is deviated, the specific steps are as follows:
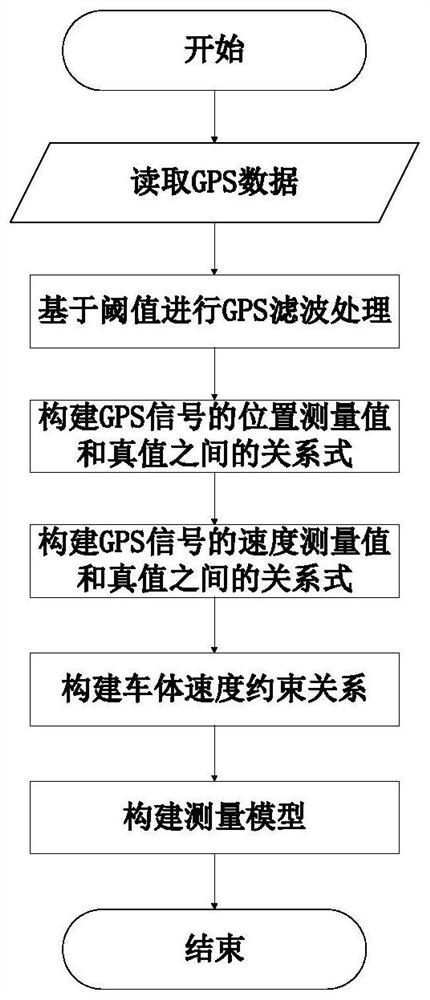
[0076] Step one, as figure 1 According to the GPS positioning information received by the controller and the parameter table of the GPS receiver, the relationship between the position measurement value and the true value based on the GPS signal is constructed; considering the Ideally, the vehicle body speed of the unmanned engineering operation equipment is 0 in the two directions perpendicular to the forward direction, so a set of speed constraint relationships are defined, and a motion constraint equation based on the speed constraint is constructed.
[0077] Step 101, the vehicle controller obtains the original output information of the GPS, and converts it into a standard float or double data type according to the communication protocol;
[0078] Step 102: Use several arrays to record the acqu...
Embodiment 2
[0135] A precise positioning method and device for unmanned engineering operation equipment used in complex environments. When GPS fails in a short time (3s time), the specific steps are as follows:
[0136] Step one, as figure 1 According to the GPS positioning information received by the controller and the parameter table of the GPS receiver, the relationship between the position measurement value and the true value based on the GPS signal is constructed; considering the Ideally, the vehicle body speed of the unmanned engineering operation equipment is 0 in the two directions perpendicular to the forward direction, so a set of speed constraint relationships are defined, and a motion constraint equation based on the speed constraint is constructed.
[0137] Step 101, the vehicle controller obtains the original output information of the GPS, and converts it into a standard float or double data type according to the communication protocol;
[0138] Step 102: Use several arrays...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More